摘 要:本发明公开了一种自走式工业大麻收获机,包括收割装置、高度调节装置、进料装置以及收割车辆,进料装置设置于收割车辆前方,高度调节装置设置于进料装置上方,收割装置设置于高度调节装置上用于调试收割装置的高度,收割装置包括铲斗、切割装置、旋转筒体以及入料口,切割装置设置于铲斗前端,入料口设置于铲斗后端,旋转筒体设置于切割装置与入料口中间,进料装置上设置有收料口,进料装置中设置有传送带,入料口设置在收料口上方,切割装置对作物进行切割,旋转筒体将作物通过入料口以及收料口卷入至收料装置中,作物通过传送带运输至设置于收割车辆内部的堆料间。
技术要点
1 .一种自走式工业大麻收获机,其特征在于:包括收割装置(1)、高度调节装置(2)、进料装置(3)以及收割车辆(4),所述进料装置(3)设置于所述收割车辆(4)的前方,所述高度调节装置(2)包括安装架(21)、滑轨架(22)和支撑架(23),所述滑轨架(22)设置于所述进料装置(3)的上方,所述安装架(21)通过轮滑板(211)可滑动地设置在所述滑轨架(22)上,所述支撑架(23)设置于滑轨架(22)的后方,所述收割装置(1)设置在所述安装架(21)上,所述滑轨架(22)内设置有升降油缸(223),所述升降油缸(223)上方设置有滑轮(222),所述滑轮(222)上设置有滑块(2221),所述滑轨架(22)侧边设置有滑动导轨(224) ,所述滑块(2221)可滑移地设置在所述滑动导轨(224)中,所述滑块(2221)上设置有凸块(2222),所述凸块(2222)与所述轮滑板(211)连接,所述升降油缸(223)可推动和牵引所述滑轮(222)上下滑动,所述滑轮(222)的后部支撑于支撑架(23)上进行滚动,从而带动所述收割装置(1)上升和下降,所述收割装置(1)包括铲斗(16)、切割装置(11)、旋转筒体(14)和入料口(15),所述旋转筒体(14)上设置有若干螺旋叶片,所述切割装置(11)设置于所述铲斗(16)的前端,所述入料口(15)设置在所述铲斗(16)后端,所述旋转筒体(14)设置于所述切割装置(11)与所述入料口(15)中间,所述旋转筒体(14)通过旋转轴(141)可旋转地设置于所述铲斗(11)中, 所述旋转轴(141)与外部进料旋转电机连接,所述进料装置(3)包括收料口(31) 、传送带(32)以及传送轴(34),所述传送带(32)绕设在所述传送轴(34)上,所述收料口(31)设置于所述入料口(15)的下方,所述旋转筒体(14)卷动所述切割装置(11)所切割的作物,所述作物通过所述入料口(15)与收料口(31)后落入到所述传送带(32)的前端,随后所述作物通过所述传送带(32)运输至设置于所述收割车辆(4)内部的堆料间。
2.根据权利要求1所述的一种自走式工业大麻收获机,其特征在于:所述滑轮(222)为左右对称设置的两组,每组滑轮包括上下设置的两个。
3.根据权利要求1所述的一种自走式工业大麻收获机,其特征在于:所述安装架(21)、滑轨架(22)和支撑架(23)相对于竖直方向具有5-10度的倾斜,令滑轮(222)支撑于支撑架(23)上进行滚动。
4.根据权利要求1所述的一种自走式工业大麻收获机,其特征在于:所述收割装置(1)上方设置有拨禾装置(13),所述拨禾装置(13)包括转轮(131) 、主连杆(132)和拨禾杆(133),所述转轮(131)与外部拨禾旋转电机连接,所述主连杆(132)设置于所述转轮(131)中心,所述拨禾杆(133)为所述主连杆(132)的圆周方向上排列设置的若干组,每组拨禾杆(133)为若干根呈直线排列组成,所述拨禾杆(133)向外延伸设置。
5.根据权利要求1所述的一种自走式工业大麻收获机,其特征在于:所述收割装置(1)上方设置有拨禾装置(13),所述拨禾装置(13)包括转轮(131)、主连杆(132)、拨禾杆(133)和辅助连杆(135),所述转轮(131)与外部拨禾旋转电机连接,所述主连杆(132)垂直设置于所述转轮(131)中心,所述转轮(131)上设置有多边形框架(134),所述辅助连杆(135)为垂直设置于所述多边形框架(134)的端点上的若干根,每根所述辅助连杆(135)上设置有一排所述拨禾杆(133),每排所述拨禾杆(133)为若干根呈直线排列组成,所述拨禾杆(133)向外延伸设置。
6.根据权利要求4或5所述的一种自走式工业大麻收获机,其特征在于:所述拨禾杆(133)上设置有若干毛刺,所述若干螺旋叶片之间设置有若干锯齿(142) ,用于增加其与作物间的接触面积,辅助所述旋转筒体(14)卷入作物。
7.根据权利要求1-5中任一项所述的一种自走式工业大麻收获机,其特征在于:所述铲斗(16)两侧设置有向前伸出的收拢板(12),用于引导作物以及保护所述切割装置(11),所述收拢板(12)向前伸出的长度大于所述切割装置(11) ,所述收拢板(12)前端设置有弹性缓冲块(121),用于保护所述收拢板(12)。
8.根据权利要求1-5中任一项所述的一种自走式工业大麻收获机,其特征在于:所述切割装置(11)包括内切割板(111)以及外切割板(112),所述外切割板(111)与所述内切割板(112)上设置有若干刀片,所述内切割板(111) 与切割电机相连接,用于使所述内切割板(111)相对于所述外切割板(112)左右移动。
9.根据权利要求1-5中任一项所述的一种自走式工业大麻收获机,其特征在于:所述传送带(32)上设置有若干传送拨板(33),用于辅助传送物料。
技术领域
本发明涉及一种农用收割机械,更具体说是一种自走式工业大麻收获机。
背景技术
工业大麻俗称汉麻,是含毒量较低的麻类品种,汉麻主要应用于纺织、服装、造纸、食品、新型材料、生物能源等多个领域。工业大麻纤维在麻类中属于上等的纺织原料,其本身具有抑菌、防辐射防静电、耐热等优良特性,工业大麻纺织品还具有环保的特性,其具有较好的商业前景,我国的工业大麻纤维制品生产加工技术有很大的突破,产品远销海外,在国际市场上得到了广泛认可。工业大麻作为一种经济作物,被我国许多省份种植。虽然汉麻和亚麻等工业大麻种植技术和育种技术已经得到了很大突破,但是对于工业大麻的收割仍处于不完善的状态,基本上采取的还是传统的人工手持工具的收割方式,致使工作效率极低,且劳动成本极高,无法扩大利润,不能够满足大规模种植的工业大麻的收割要求。
发明内容
针对现有技术存在的不足,本发明的目的在于提供一种自走式工业大麻收获机,在收割车辆前端设置收割装置,可方便快捷地对大规模种植的工业大麻进行收割,极大提升工作效率,减低劳动成本。
为实现上述目的,本发明提供了如下技术方案:一种自走式工业大麻收获机包括收割装置、高度调节装置、进料装置以及收割车辆,进料装置设置于收割车辆的前方,高度调节装置包括安装架、滑轨架和支撑架,滑轨架设置于进料装置的上方,安装架通过轮滑板可滑动地设置在滑轨架上,支撑架设置于滑轨架的后方,收割装置设置在安装架上,滑轨架内设置有升降油缸,升降油缸上方设置有滑轮,滑轮上设置有滑块,滑轨架侧边设置有滑动导轨,滑块可滑移地设置在滑动导轨中,滑块上设置有凸块,凸块与轮滑板连接,升降油缸可推动和牵引滑轮上下滑动,滑轮的后部支撑于支撑架上进行滚动,从而带动收割装置上升和下降,收割装置包括铲斗、切割装置、旋转筒体和入料口,旋转筒体上设置有若干螺旋叶片,切割装置设置于铲斗的前端,入料口设置在铲斗后端,旋转筒体设置于切割装置与入料口中间,旋转筒体通过旋转轴可旋转地设置于铲斗中,旋转轴与外部进料旋转电机连接,进料装置包括收料口、传送带以及传送轴,传送带绕设在传送轴上,收料口设置于入料口的下方,旋转筒体卷动切割装置所切割的作物,作物通过入料口与收料口后落入到传送带的前端,随后作物通过传送带运输至设置于收割车辆内部的堆料间。
作为一种改进,滑轮为左右对称设置的两组,每组滑轮包括上下设置的两个。
作为一种改进,安装架、滑轨架和支撑架相对于竖直方向具有5-10度的倾斜,令滑轮支撑于支撑架上进行滚动。
作为一种改进,收割装置上方设置有拨禾装置,拨禾装置包括转轮、主连杆和拨禾杆,转轮与外部拨禾旋转电机连接,主连杆设置于转轮中心,拨禾杆为主连杆的圆周方向上排列设置的若干组,每组拨禾杆为若干根呈直线排列组成。
作为一种改进,收割装置上方设置有拨禾装置,拨禾装置包括转轮、主连杆、拨禾杆和辅助连杆,转轮与外部拨禾旋转电机连接,主连杆垂直设置于转轮中心,转轮上设置有多边形框架,辅助连杆为垂直设置于多边形框架的端点上的若干根,每根辅助连杆上设置有一排拨禾杆,每排拨禾杆为若干根呈直线排列组成,每根拨禾杆向外延伸设置。
作为一种改进,拨禾杆上设置有若干毛刺,若干螺旋叶片之间设置有若干锯齿,用于增加其与作物间的接触面积,辅助旋转筒体卷入作物。
作为一种改进,铲斗两侧设置有向前伸出的收拢板,用于引导作物以及保护切割装置,收拢板向前伸出的长度大于切割装置,收拢板前端设置有弹性缓冲块,用于保护收拢板。
作为一种改进,切割装置包括内切割板以及外切割板,外切割板与内切割板上设置有若干刀片,内切割板与切割电机相连接,用于使内切割板相对于外切割板左右移动。
作为一种改进,传送带上设置有若干传送拨板,用于辅助传送物料。
本发明的有益效果:通过在收割车辆前端设置收割装置,并在收割装置前端设置切割装置,在车辆运行的过程中,可实现对工业大麻的快速切割,通过设置具有若干螺旋叶片的旋转筒体,实现将所切割的工业大麻迅速通过入料口与收料口卷入至进料装置中;通过在进料装置的进料口下方设置传送轴以及绕设在传送轴上的传送带,作物经过进料口进入到传送带前端后,通过传送带实现将工业大麻自动运输至设置于收割车辆内部的堆料间;通过在进料口上方设置滑轨架,安装架通过轮滑板可滑动地设置在滑轨架上,收割装置设置在安装架上,滑轨架内设置有升降油缸,升降油缸上方设置有滑轮,滑轮与轮滑板连接并支撑于支撑架上,升降油缸的伸缩可带动收割装置上升和下降,操作人员可根据工业大麻的实际高度调整收割装置的高度,便于对工业大麻进行精准收割,提升了收割效率,从而取代旧有的人工手持工具收割方式,降低了劳动成本,增加了利润。
附图说明
图1为本发明自走式工业大麻收获机的立体结构示意图。
图2为本发明的收割装置的局部立体结构示意图。
图3为本发明的收割装置以及高度调节装置的右视结构示意图。
图4为本发明的高度调节装置的正剖面的结构示意图。
图5为本发明的收割装置的俯视结构示意图。
图6为本发明的进料装置局部的立体结构示意图。
图7为本发明的传送轴、传送带以及传送拨板的立体结构示意图。
具体实施方式
以下结合附图对本发明的具体实施例做详细说明。
如图1-7所示,为本发明自走式工业大麻收获机的具体实施例,本实施例包括收割装置1、高度调节装置2、进料装置3以及收割车辆4,进料装置3设置于收割车辆4的前方,高度调节装置2包括安装架21、滑轨架22和支撑架23,滑轨架22设置于进料装置3的上方,安装架21通过轮滑板211可滑动地设置在滑轨架22上,支撑架23设置于滑轨架22的后方,收割装置1设置在安装架21上,滑轨架22内设置有升降油缸223,升降油缸223上方设置有滑轮222,滑轮222上设置有滑块2221,滑轨架22侧边设置有滑动导轨224,滑块2221可滑移地设置在滑动导轨224中,滑块2221上设置有凸块2222,凸块2222与轮滑板211连接,升降油缸223可推动和牵引滑轮222上下滑动,滑轮222的后部支撑于支撑架23上进行滚动,从而带动收割装置1上升和下降,收割装置1包括铲斗16、切割装置11、旋转筒体14和入料口15,旋转筒体14上设置有若干螺旋叶片,切割装置11设置于铲斗16的前端,入料口15设置在铲斗16后端,旋转筒体14设置于切割装置11与入料口15中间,旋转筒体14通过旋转轴141可旋转地设置于铲斗11中,旋转轴141与外部进料旋转电机连接,进料装置3包括收料口31、传送带32以及传送轴34,传送带32绕设在传送轴34上,收料口31设置于入料口15的下方,旋转筒体14卷动切割装置11所切割的作物,作物通过入料口15与收料口31后落入到传送带32的前端,随后作物通过传送带32运输至设置于收割车辆4内部的堆料间。
本发明在使用时,操作人员驾驶收割车辆进入工业大麻收割区域,当收割车辆准备进入工业大麻收割区域时,操作人员启动设置于车辆前方的收割装置1,在车辆行驶在工业大麻收割区域的同时,切割装置11对迎来的工业大麻进行迅速切割,随后置于切割装置11后方的旋转筒体14迅速卷动所切割的工业大麻,所切割的工业大麻通过入料口15以及收料口31落入至进料装置3中的传送带32前端,所切割的工业大麻通过传送带32的传动被送入至设置于收割车辆4内部的堆料间等待被处理;通过在进料装置3的上前方设置滑轨架22,安装架21通过轮滑板211可滑动地设置在滑轨架22上,收割装置1设置在安装架21上,滑轨架22内部设置有升降油缸223与滑轮222,滑轮222通过滑块2221与外部轮滑板211连接,滑轮222支撑于支撑架23上,滑块2221可在滑动导轨224中上下滑移,通过控制升降油缸223 伸缩从而控制滑轮222上下移动,进而实现收割装置1的上升和下降;为便于对不同类型不同高度的工业大麻进行收割,操作人员通过调节设置于进料装置3上前方的高度调节装置2,从而调节收割装置1的高度至所需高度与目标工业大麻茎杆下部对应,可以根据茎杆不同的需求进行不同高度的切割,并且可以根据种植地面调试高度,避免切割装置11的受损; 在调试好高度后,便可以通过收割装置1对目标工业大麻进行收割,提高收割效率,并且适应性广。
作为一种改进的具体实施方式,滑轮222为左右对称设置的两组,每组滑轮包括上下设置的两个。
如图4所示,该种实施方式下,形成左右两对滑轮222,两对滑轮222之间可进行连接然后连接至升降油缸223进行同步带动,其可以形成良好的稳定结构,在升降油缸223推动和牵引滑轮上下移动的过程中,能始终处于稳固状态,同时两组滑轮通过均通过滑块2221与外部收割装置1连接,避免了收割装置在上升和下降滑移过程中发生反转或倾覆。
作为一种改进的具体实施方式,安装架21、滑轨架22和支撑架23相对于竖直方向具有5-10度的倾斜,令滑轮222支撑于支撑架23上进行滚动。
以上实施方式在附图中未示出,来设置5-10度的角度之后,令安装架21、滑轨架22 的重量良好的通过滑轮222支撑在支撑架23上,提高结构稳定性,并在升降油缸223驱动滑轮222上下移动时,提供良好的支撑,降低升降油缸223的结构压力。
作为一种改进的具体实施方式,收割装置1上方设置有拨禾装置13,拨禾装置13包括转轮131、主连杆132和拨禾杆133,转轮131与外部拨禾旋转电机连接,主连杆132设置于转轮131中心,拨禾杆133为主连杆132的圆周方向上排列设置的若干组,每组拨禾杆133为若干根呈直线排列组成,拨禾杆133向外延伸设置。
如图1、2、3所示,在对工业大麻进行收割的过程中,需要保证工业大麻倒向收割装置1内,便于切割与收集,通过在收割装置1上方设置拨禾装置13实现导向功能,启动外部拨禾旋转电机,带动转轮131旋转从而带动设置于转轮131中心的主连杆132以及设置于主连杆132圆周方向上的拨禾杆133进行旋转,拨禾杆133向下旋转,拨禾杆133之间的间隙达到夹持或扶持大麻茎杆向下的目的,实现将待收割工业大麻引导入旋转筒体14直至入料口15 内的目的。
作为一种改进的具体实施方式,收割装置1上方设置有拨禾装置13,拨禾装置13包括转轮131、主连杆132、拨禾杆133和辅助连杆135,转轮131与外部拨禾旋转电机连接,主连杆132垂直设置于转轮131中心,转轮131上设置有多边形框架134,辅助连杆135为垂直设置于多边形框架134的端点上的若干根,每根辅助连杆135上设置有一排拨禾杆133,每排拨禾杆133为若干根呈直线排列组成,每根拨禾杆133向外延伸设置。
如图1、2、3所示,通过在转轮131中心设置主连杆132,实现稳固支撑整个拨禾装置13的作用;通过在转轮131上设置多边形框架134,在多边形框架134每个端点上设置一条辅助连杆135,同时在每条辅助连杆135上设置一排拨禾杆133,拨禾杆133沿主连杆132圆周方向上设置,实现增大拨禾杆133与工业大麻的接触面积,提升对工业大麻的拨动效率,使工业大麻能迅速导向收割装置1内,减少未被收割大麻数量,整体提升收割效率。
作为一种改进的具体实施方式,拨禾杆133上设置有若干毛刺,若干螺旋叶片之间设置有若干锯齿142,用于增加其与作物间的接触面积,辅助旋转筒体14卷入作物。
如图2所示,通过在拨禾杆133上设置若干毛刺,增加拨禾杆133与工业大麻之间的接触面积,在拨禾装置13旋转的过程中,带有毛刺的拨禾杆133能够几乎无遗漏地将工业大麻导入至收割装置1中;通过在旋转筒体14的若干螺旋叶片之间设置若干锯齿142,增大其与工业大麻的接触面积,从而实现迅速将工业大麻卷入进料装置3的目的,增加整体收割装置1的收割效率。
作为一种改进的具体实施方式,铲斗16两侧设置有向前伸出的收拢板12,用于引导作物以及保护切割装置11,收拢板12向前伸出的长度大于切割装置1l,收拢板12前端设置有弹性缓冲块121,用于保护收拢板12。
如图1、2、3所示,通过在铲斗16两侧分别设置向前伸出的防撞板12,在对目标作物进行收割的过程中,可引导作物进入收割装置1中,该防撞板12向前伸出的长度大于切割装置11,从而在收割车辆4运行的过程中,防止切割装置11触碰到坚硬物而变形损坏,增强了收割装置1整体的耐久度,同时在防撞板12的前端设置弹性缓冲块121从而保护防撞板12,减轻防撞板12在冲击坚硬物后的进一步损坏。
作为一种改进的具体实施方式,切割装置11包括内切割板111以及外切割板112,外切割板111与内切割板112上设置有若干刀片,内切割板111与切割电机相连接,用于使内切割板111相对于外切割板112左右移动。[0037]如图5所示,通过设置内切割板111和外切割板112,内切割板111与外切割板112上均设置有若干刀片,内切割板111与切割电机连接,启动切割电机,内切割板111相对于外切割板112左右往返移动,从而实现对工业大麻的切割。
作为一种改进的具体实施方式,传送带32上设置有若干传送拨板33,用于辅助传送物料。
如图7所示,在传送带32上设置若干传送板33,从而增大传送带32与工业大麻的摩擦力,防止作物堆积在传送带32上而无法被传送至后方堆料间,提升传送效率。
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
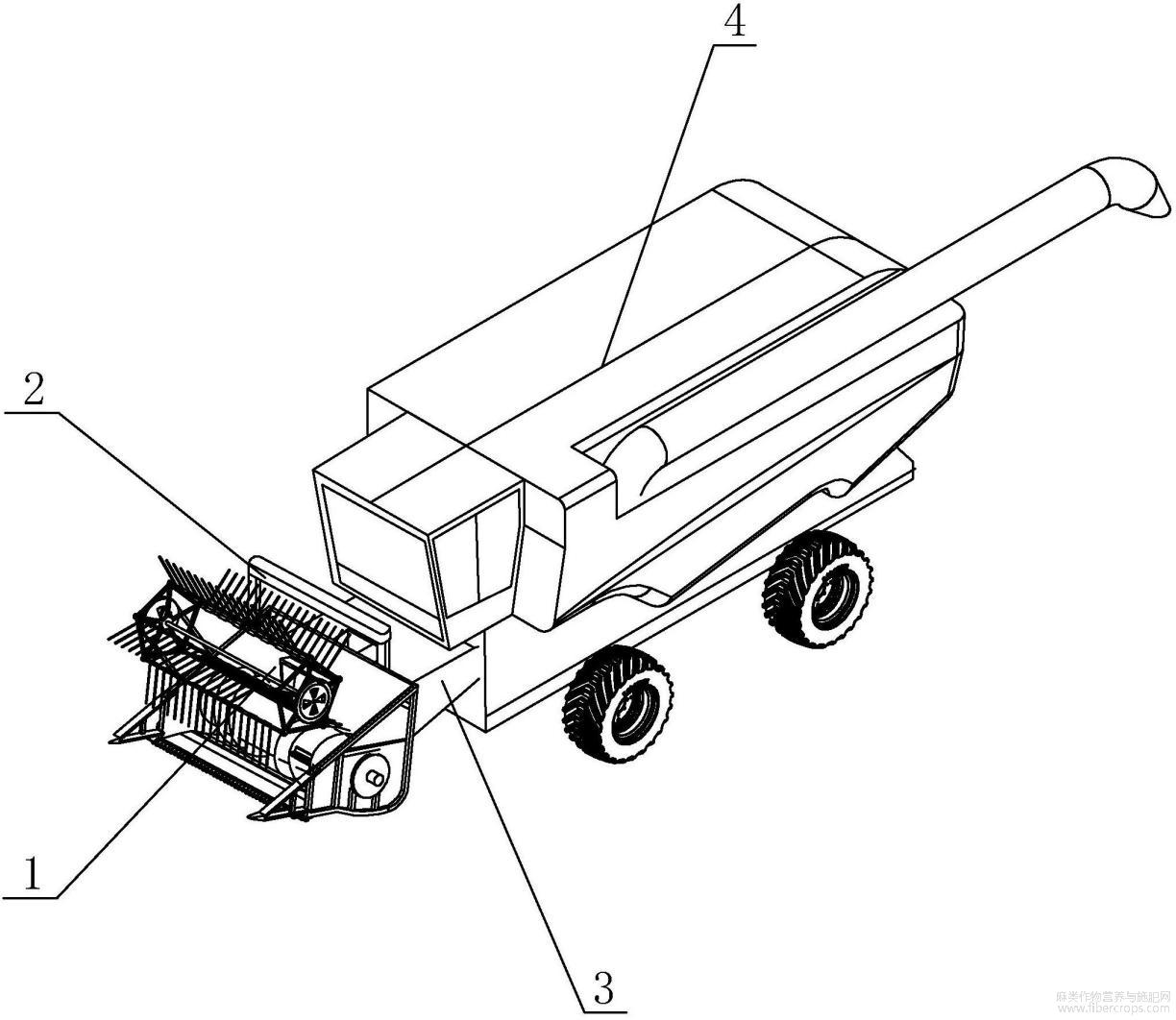
图1
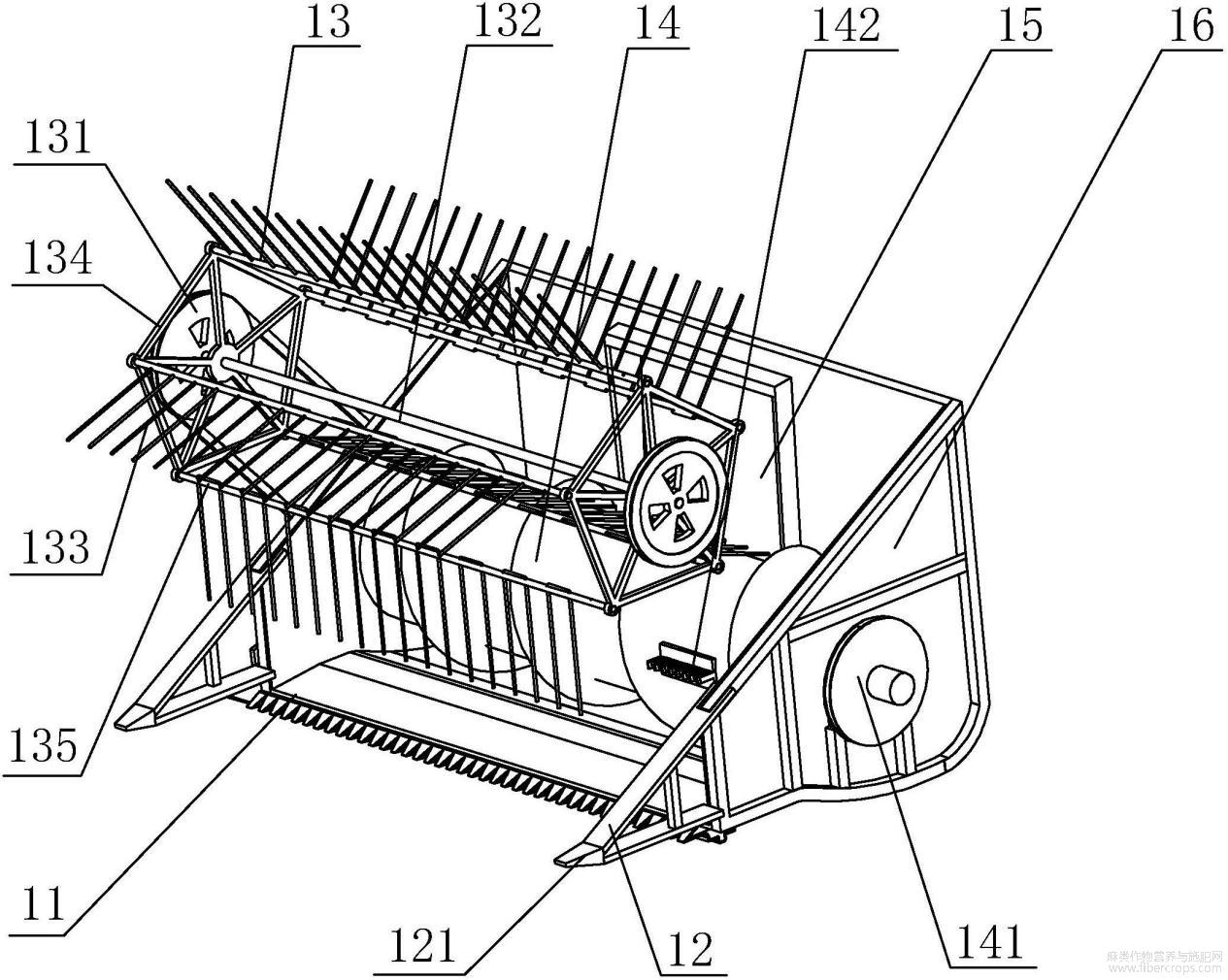
图2
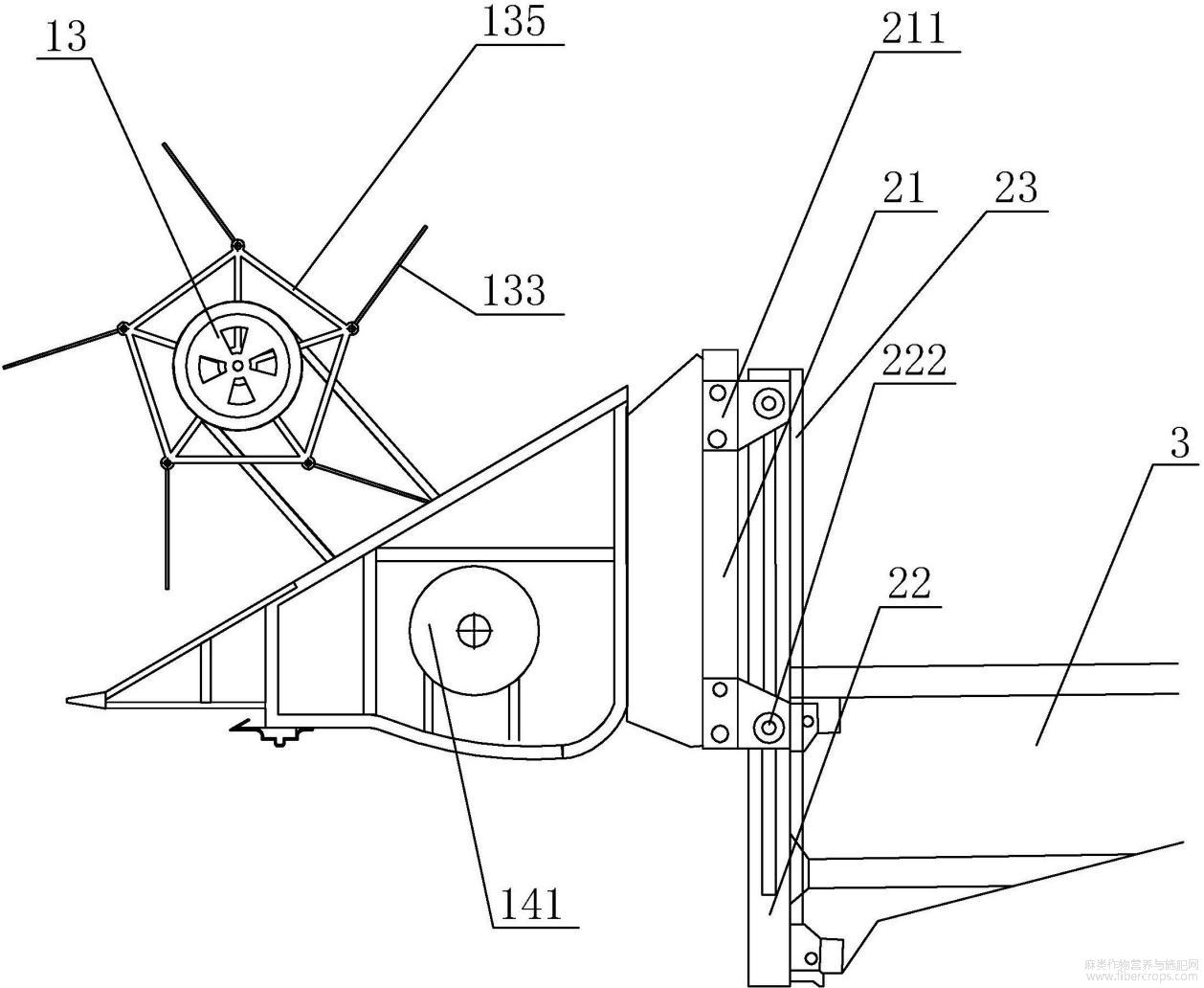
图3
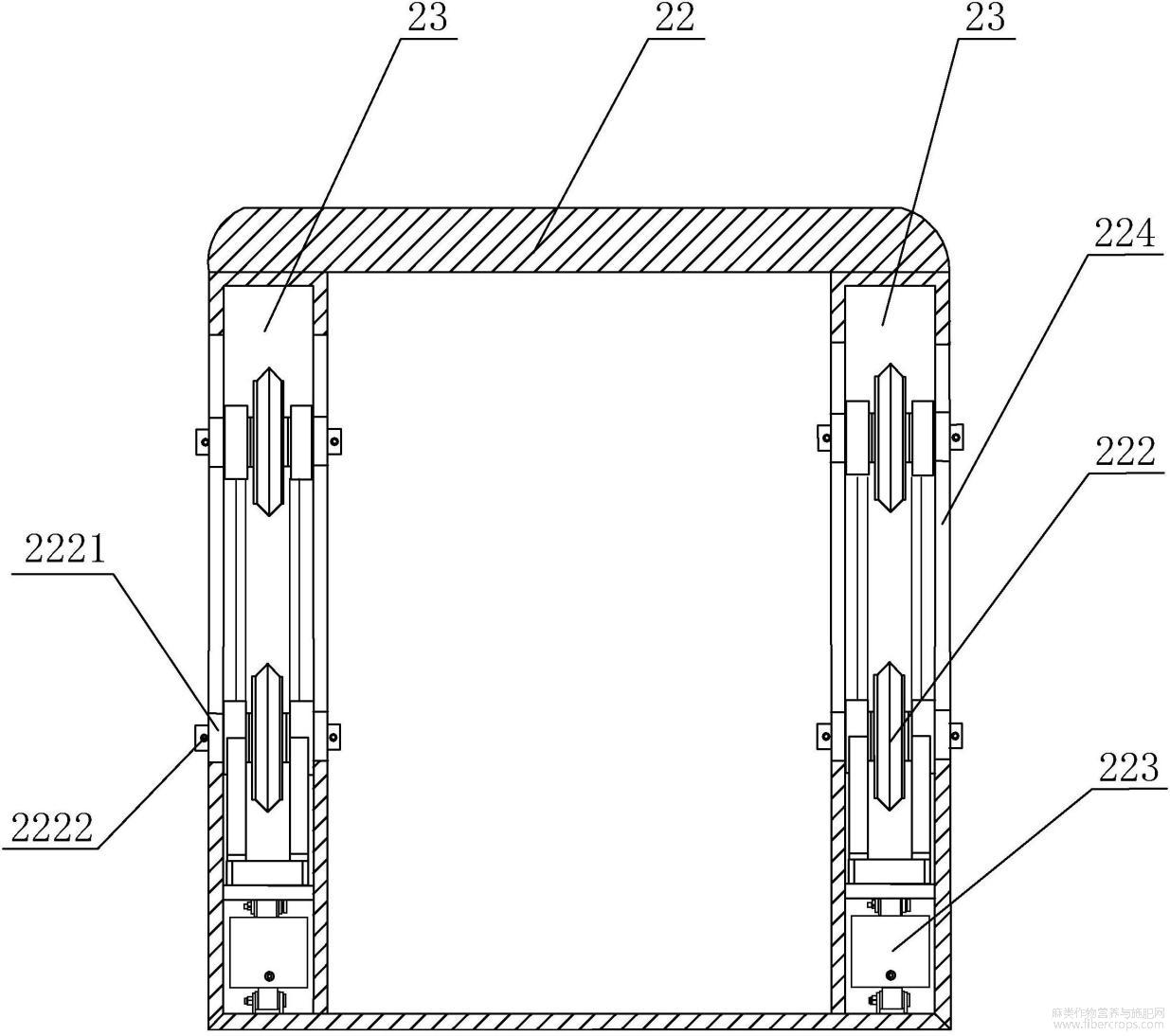
图4
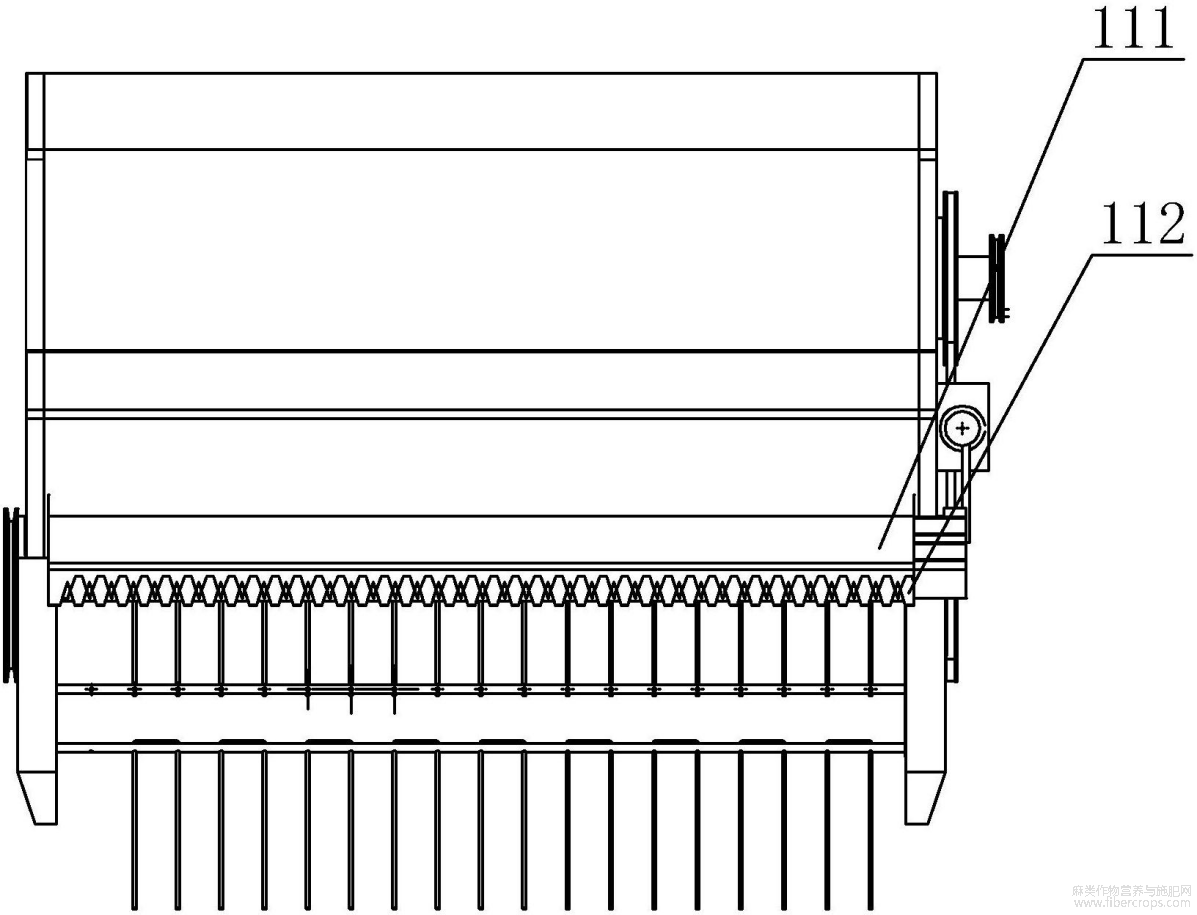
图5
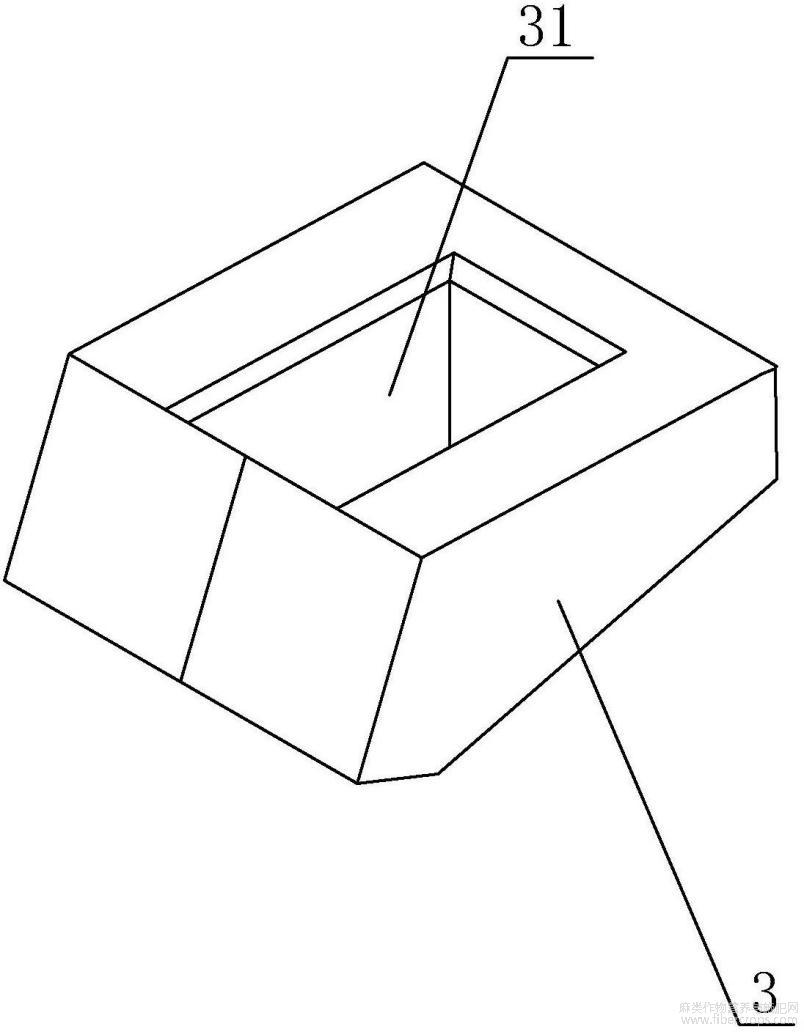
图6

图7
摘自国家发明专利,发明人:李显旺,黄继承,张彬,田昆鹏,沈成,刘浩鲁,申请号202011219985 .9,申请日2020 .11 .04
