摘 要:针对传统舀种勺式穴播器在工作过程中,种群被舀种勺种室两侧分流,播种滚筒内种量较少时,舀种勺腔充种不完全的问题,基于胡麻种子物理特性和种植农艺要求,设计一种种群聚集、直接舀种的胡麻精量穴播器。通过分析穴播器工作原理确定其组成、聚种斜槽结构和直流舀种勺结构参数范围,对直流舀种勺舀种过程和清种过程进行运动分析,确定穴播器角速度范围;以直流舀种勺深度、过桥槽夹角和穴播器角速度为试验因素,以穴播器排种合格率、漏播率和重播率为试验指标,借助EDEM离散元仿真软件开展二次旋转正交组合试验,结果表明:直流舀种勺深度为2.75mm、过桥槽夹角为56.56°、穴播器角速度为2.71rad/s时性能最佳,此时穴播器排种合格率为94.27%,漏播率为5.67%,重播率为0.06%。台架试验发现排种合格率、漏播率和重播率平均值分别为89.00%、8.33%、2.67%,台架试验结果与仿真试验结果基本一致。对比直流舀种勺和勺舌式舀种勺排种效果,试验结果表明,直流舀种勺的排种效果优于勺舌式舀种勺的排种效果,穴播器排种合格率最大可提高3.39个百分点,漏播率最大可下降 2.68个百分点,重播率最大可下降2个百分点。
关键词:胡麻;穴播器;聚种斜槽;直流舀种勺;EDEM
0 引言
目前胡麻种植多以人工点播和撒播为主,劳动强度大、作业效率低,不便后期田间管理。因此研制一种结构简单、高效的胡麻精量穴播器对于实现胡麻种植机械化和规模化发展具有重要意义。
排种器是保证播种机工作质量和效率的关键。根据其工作原理,排种器分为机械式和气力式[1]-[7]。气力式排种器排种精度高,种子损伤率低,但其结构复杂、生产成本高[8-11]。机械式排种器具有结构简单、生产成本低、易于播种等优点[12-14],成为丘陵山区胡麻机械化种植的首选。机械化穴播是实现精量播种的主要方式之一,具有定量和定穴距播种的优点,可有效提高作物的出苗率和成活率[15]。为提高穴播器的性能,SINGH等[16]对穴播器进行优化设计,确定穴播器最优的型孔锥角;RATNYAKE等[17]研制一种水稻锥形滚筒穴播机,相比直播节省种子约75%,增产约37%;张青松等[18]设计了一种带缺口矩形油菜勺式精量穴播排种器,解决传统油菜条播用种量大、株距变异系数大的问题;张顺等[19]为适应常规水稻轻简化精量穴直播种植,设计了一种U型腔道式水稻精量穴播排种器。张国忠等[20]设计了一种具有弧形毛刷清种护种装置的双腔侧充式水稻精量穴播排种器,实现杂交稻和常规稻的大田精量穴播;石林榕等[21]设计了一种带舀种勺舌的滚勺式胡麻精量穴播器,在传统舀种勺勺腔两侧设计舀种勺舌,将胡麻种子导引填充舀种勺腔,解决传统穴播器漏充严重的问题,但是引种舌的设置增加了胡麻种子进入种室的时间,尤其当穴播器内腔种量较少时,舀种成功率有待提高。综上,国内外对穴播器的研究主要集中在水稻、油菜等规则形状的作物[22],对于胡麻等异形小籽粒作物种子的穴播器研究较少。
基于传统穴播器内腔种量较少时,舀种勺舀取种子不充分、引种舌导引种子填充勺腔不完全的问题,提出将分散种群沿穴播器内腔两侧汇聚、种子流直接充填舀种勺腔的方法,设计一种种群直流舀种式胡麻精量穴播器,在结构上沿用舀种勺舌式穴播器结构简单、不伤种的优势,通过理论分析设计穴播器结构,利用离散元仿真试验确定穴播器最优结构参数和工作参数,通过台架试验和对比试验对种群直流舀种式胡麻精量穴播器的排种性能进行验证,以期为异形小籽粒排种器的设计提供参考。
1 胡麻种植农艺
西北旱区胡麻种植农艺要求如图1所示,根据胡麻机械化穴播要求,播量为 37.5~52.5kg/hm2,穴粒数6~10粒。为便于中耕机和收获机作业,确定播种穴距为200mm,株距为200mm,播深30~50mm[23]。
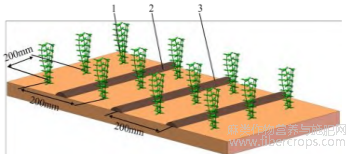
图1 胡麻种植农艺要求
2 穴播器结构与工作原理
2.1 总体结构
种群直流舀种式胡麻精量穴播器主要由播种滚筒、舀种勺、导种管、旋转轴和排种嘴等组成。播种滚筒是由圆周阵列布置的聚种斜槽组成的聚种腔体,由位于聚种腔体两侧的前后安装盘、侧板围成的空心旋转体结构组成,如图2所示。穴播器侧板壁设有导种管,聚种腔体内壁形成供种子流动的环形流动通道,舀种勺均布安装在聚种腔体内,形成一圆平面,该平面穿过流动通道,有利于提高舀种成功率。
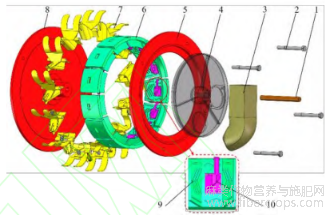
图2 穴播器结构示意图
2.2 工作原理
穴播器工作时,舀种勺需经历舀种、换位清种、过桥清种、导种和排种5个阶段,穴播器工作原理如图3所示。胡麻种子通过导种管进入穴播器内腔,穴播器在种床上滚动,舀种勺随之旋转舀取一定量的胡麻种子,胡麻种子在自身重力、种间相互作用力、聚种腔体和舀种勺扰动的作用下进入勺腔,完成舀种。随着穴播器的继续转动,舀种勺舀取的部分种子失去底部支持力而掉落,形成第1次清种。随后,舀种勺腔内的胡麻种子沿过桥槽滑向种室,由于种室入口阻挡,过桥槽表面种子掉落,形成第2次清种。当舀种勺运动至导种区时,胡麻种子沿种室滑道通过泄种口进入排种嘴。随着排种嘴插入种床挤压复位弹簧,活动排种嘴张开胡麻种子顺利排入穴孔中,当排种嘴离开穴孔后,穴孔周围土壤坍塌掩埋种子,经镇压轮压实,完成一个周期的排种作业。
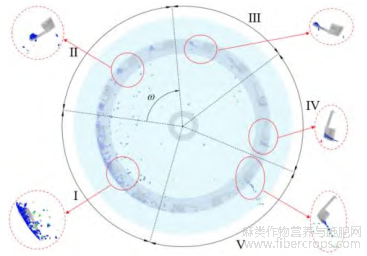
图3 穴播器工作原理图
3 关键零件设计
3.1 胡麻种子基本参数
种子的形状及特征尺寸是穴播器关键零件结构设计的重要依据[24]。本文选择甘肃地区广泛种植的陇亚10号胡麻种子。种子外形扁平,顶部稍尖,整体呈“瓜子状”,如图4所示,随机选取100粒为试验对象,用精度为0.02mm的数显式游标卡尺对其三轴尺寸进行测量,重复3次,平均三轴尺寸:长Lmean为4.43mm,宽Wmean为2.38mm,厚Tmean为0.95mm。含水率为5.13%,千粒质量为8.13 g,自然休止角为23°,质量密度为1.05g/mL,体积密度为0.66 g/mL[25]。
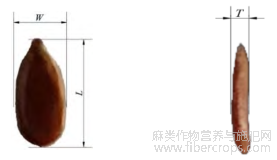
图4 胡麻种子基本参数
3.2 播种滚筒设计
3.2.1 结构参数设计
播种滚筒直径决定舀种勺的数量及分布,对穴播器性能至关重要。基于西北旱区胡麻种植农艺要求,参考其他舀种勺式穴播器直径360~480mm,播种滚筒直径过小,圆周可分布的舀种勺数量减少,穴播器质量减轻,易造成排种嘴入土深度不足,种子浮在土壤表面,影响出苗;播种滚筒直径过大时,舀种勺数目增多,有利于降低穴播器的工作转速,提高排种稳定性,但直径过大增加制造成本,而且穴播器圆周跳动频率增加,不利于拖拉机牵引。播种滚筒宽度影响胡麻种植效益,宽度增加行距变大,降低胡麻种植密度;宽度减小,胡麻种植密集,不利于后期田间管理。综合考虑,本研究选取播种滚筒宽度W1为70mm,侧板直径D4为260mm,播种滚筒直径D2为330mm,排种嘴垂直高度为65mm,聚种斜槽厚度为10mm,确定种子流环形流动通道直径D3 为320mm,穴播器直径D1为460mm,结构见图5。
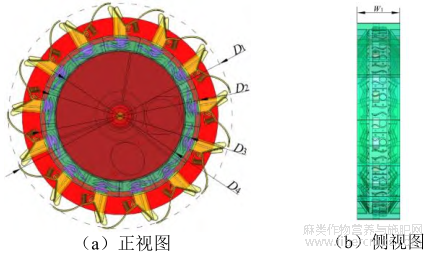
图5 播种滚筒结构图
3.2.2 聚种斜槽设计
当穴播器工作一定时间后,内腔中种量变少,舀种勺腔填充不完全易造成漏播。本研究设计的聚种斜槽利用其表面滑种侧板将少量种子汇聚,便于舀种勺舀取种子。聚种斜槽主要由滑种侧板、V字形扰种齿、一字形花纹和沿两侧一字形花纹中心线延伸的S形花纹组成,其结构如图6a所示。V字形扰种齿紧贴于聚种斜槽内壁,可打破穴播器内腔中种群稳定堆积状态,其V字开口朝向种子流环形流动通道,引导种子朝流动通道移动,提高舀种成功率。本研究设计的V字形扰种齿是由长度Lr为20mm、宽度Wr为1mm的2个矩形长条组成,设扰种齿厚度为T1,扰种齿倾角为β,扰种齿间距为h,如图6b所示。聚种斜槽安装时不能与穴播器原有结构干涉,由前期分析可知,穴播器侧板直径D4为260mm,聚种斜槽厚度为10mm,综合考虑,确定聚种斜槽垂直高度H1为30mm,滑种侧板垂直高度H2为20mm、宽度W3为3mm,胡麻种子自然休止角为23。,为保证滑种侧板对其表面种子汇聚,确定聚种斜槽倾角α为50°,聚种斜槽安装在播种滚筒内部,其宽度应与播种滚筒宽度一致,故聚种斜槽宽度W2 为70mm,如图6c所示,将以上参数代入公式(1)中

通过计算可得,种子流环形流动通道宽度W4为30.4mm。
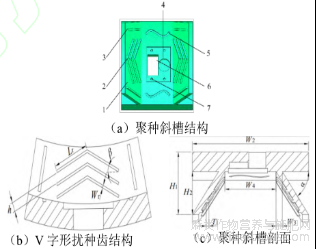
图6 聚种斜槽结构图
当扰种齿厚度较小时,不能充分扰动种群,不利于舀种勺充种;当扰种齿厚度过大时,对种子扰动效果好,种群流动性增强,但会出现扰种齿携种现象。因此,扰种齿应仅扰动贴近聚种斜槽内壁的一薄层种子为宜[26],即满足:
![]()
由式(2)可知扰种齿厚度T1范围为0.76 ~0.95mm,为便于加工制作,本研究确定扰种齿厚度T1为1mm。根据文献[27],当扰种齿间距h小于2倍种子长度时,种子会在扰种齿中间夹持,易损伤种子,因此应使h>2Lmean,故扰种齿间距h应大于8.86mm;鉴于胡麻种子被V字形扰种齿引导朝种子流环形流动通道移动,综合考虑确定扰种齿间距h为9mm,扰种齿倾角β为30°。
对聚种斜槽扰种过程进行受力分析,以贴近扰种齿上部单粒种子为研究对象,将其视为一个刚性质点,以种子质心为原点O建立空间直角坐标系,x轴垂直于滑种侧板内壁,y轴平行于扰种齿上表面,z轴通过种子垂直于扰种齿上表面,如图7所示。
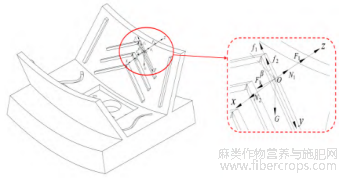
图7 扰种过程受力分析
根据种子在扰种齿上的受力投影图(图8)可知,种子在 x、y、z 方向上的受力方程为
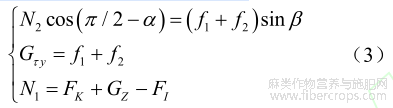
式中 N1——扰种齿对种子的支持力,N
N2——滑种侧板对种子的支持力,N
f1——种子与扰种齿表面摩擦力,N
f2——种子与滑种侧板表面摩擦力,N
Gty ——重力 G 在 y 轴方向的分力,N
FK——种子科氏力,N
Gz——重力 G 在 z 轴方向的分力,N
FI——种子离心力,N
其中
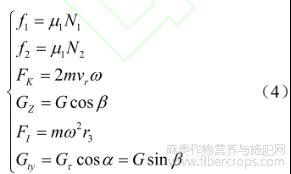
式中
μ1——种子与聚种斜槽间的滑动摩擦因数
m ——种子质量,kg
vr——种子相对速度,m/s
r3——种子流动通道半径,mm 石
ω——穴播器角速度,rad/s
Gr——重力 G 沿扰种齿倾角分解的切向力,N
为使扰种齿上表面种子沿齿条向种子流动通道移动,应确保其有沿y轴正向运动的趋势,即
![]()
将式(3)、(4)代入式(5)中可得

由式(6)可知,影响种子与扰种齿相对运动的参数有穴播器角速度ω、种子与聚种斜槽间的滑动摩擦因数μ1、种子流流动通道半r3、聚种斜槽倾角α和扰种齿倾角β。将前期确定参数代入式(6),经计算种子与扰种齿发生相对运动 穴播器角速度ω>0.346 rad/s。
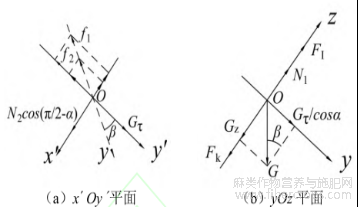
图8 扰种过程受力投影图
3.3 直流充种舀种勺设计
3.3.1 直流充种舀种勺结构设计
舀种勺是穴播器实现精量排种的核心部件,其结构参数直接影响穴播器排种的精确性和稳定性。传统舀种勺工作时,种子需要绕过种室的两侧才能进入舀种勺腔,降低了种子进入舀种勺腔的概率,尤其是种子数量较少时因此,课题组前期研究在舀种勺腔两侧设置引种舌,将种室两侧的种子流进行导引填充舀种勺腔,间接扩大种子流与舀种勺腔的接触面积,从而提高种子进入舀种勺腔的概率,但种子需要引种舌表面移动后才能进入舀种勺腔,增加种子进入舀种勺腔的时间,而种子随穴播器快速转动时,会导致部分种子在进入舀种勺腔时由于转动幅度大从舀种勺腔表面掉落至种群,进入舀种勺腔的种量减少,降低舀种成功率。基于此,本研究设计一种直流充种舀种勺,为保证种子直接充填舀种勺腔重点将传统舀种勺种室部分进行“侧身”设计,使种室与舀种勺腔不在同一平面上,主要由舀种勺腔、过桥槽、种室、安装板组成,其结构见图9。
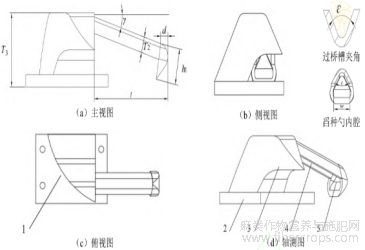
图9 直流舀种勺结构图
3.3.2 舀种勺倾角
为使得舀种勺腔内的种子经过桥槽顺利进入种室,设舀种勺过桥槽与种室上壁水平面之间倾角γ。离开换位清种区的舀种勺随播种滚筒转动,在到达过桥清种区入口时,若倾角γ过大,勺腔表面种子在未进入过桥槽时,由于自身重力和惯性力的作用,种子将会掉落回种群。为此,对舀种勺过桥清种运动过程的胡麻种子进行力学分析,如图10所示
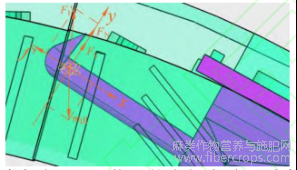
图10 过桥清种区入口临界状态胡麻种子受力分析
将舀取的胡麻种子作为一个整体,以整体质心为坐标轴原点,x轴平行于过桥槽,指向穴播器运动方向,y轴正向垂直于x轴并向外,由此建立直角坐标系,对种子进行受力分析,得
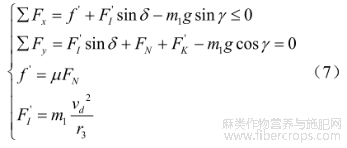
式中 ∑Fx——种子在 x 轴方向所受合力,N
∑Fy——种子在 y 轴方向所受合力,N
FI——种子所受转动离心力,N
f——种子与舀种勺间的摩擦力,N
FN——过桥槽对种子的支持力,N
FK——种子所受科氏力,N
νd——穴播器线速度,m/s
舀种勺随播种滚筒转动,x方向的合力沿x轴的正方向,保证种子沿过桥槽流动,y轴方向的合力沿着y轴负方向保证种子不被甩出。当播种滚筒线速度为 0.3 m/s、FI与y轴正向夹角δ为0°时。计算倾角γ的极限值,由于舀种勺和聚种斜槽采用3D打印,材料为尼龙,滑动摩擦因数μ1为0.42,式(7)可简化为
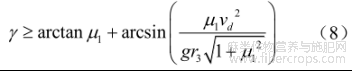
由式(8)可得γ≥24.04,由前期分析可知,舀种勺倾角不宜太大,综合加工成本及播种滚筒内腔结构,确定舀种勺倾角γ为 30°。
3.3.3 导种滑道设计
合理规划导种滑道是确保顺畅导种的关键。如图11所示,以种室左顶点为原点,水平方向为x轴,竖直方向为y轴建立坐标系,将同一舀种勺同周期进入种室的种子视为整体,导种过程中种子所处位置的半径记为r,种子位置与竖直方向夹角记为ψ,导种过程起始位置半径记ra,角度记为ψa,结束位置记为rb,角度记为ψb,种子所受合外力方向沿滑道切向。
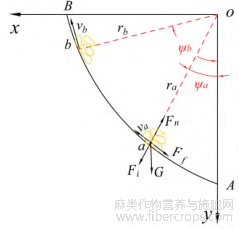
图11 导种过程分析
导种过程中为保证种子顺利进入排种嘴,种子所受合外力始终大于0,根据能量守恒定律可得,种子所受合外力做功为

式中νa——点 a 处种子接触滑道时速度,m/s
νb——种子离开导种滑道时速度,m/s
Fi——种子所受离心力,N
Fn——种子所受支持力,N
Ff——种子所受摩擦力,N
G——种子所受重力,N
由式(9)可知,种子离开导种滑道时的速度νb与种子进入滑道的速度νa、种子位置半径r和穴播器角速度ω有关。为防止种子通过导种滑道进入排种嘴时速度较大与排种嘴碰撞产生弹跳损伤其表面,应减小穴播器角速度ω和种子位置半径r。当穴播器角速度ω较小时,一定程度上可提高排种稳定性,但相应排种株距变大,不满足胡麻种植要求。舀种勺种室宽度一定,种子离开导种滑道位置半径rb远小于进入滑道位置半径ra时,滑道相应曲率增大,种子较快进入滑道与内壁碰撞,掉落回排种嘴。基于此本研究设计导种滑道为种子位置半径逐渐减小的弧线,当种子快速进入导种滑道后,滑道内壁起一定缓冲作用降低种子速度,且当穴播器匀速运转时,可以判断种子所受合外力为0,种子在导种滑道中保持匀速运动,直至进入排种嘴。
3.3.4 直流充种舀种勺其他参数的确定
考虑到直流充种舀种勺工作的稳定性,设计过桥槽高度T2 为3mm、过桥槽长度l为30mm、舀种勺高度T3为30mm。西北地区胡麻种植农艺要求每穴胡麻数为6~10粒,以8粒为依据,经计算所需体积为41.7mm3。簸箕形体舀种勺截面下底边长w大于种长,小于2倍种长,最后确定w为8mm。舀种勺截面高h1确定为4倍的种宽,h1约为5mm。舀种勺深度d越大舀取过程舀取的种子越多,由前期试验可知,舀种勺深度d不超过4mm,初步确定d为3mm。过桥槽夹角ε的大小关系过桥槽截面大小进而影响通过过桥槽的种子量,为保证种子顺利通过过桥槽,过桥槽截面三角形底边长应大于种宽,小于2倍种宽,如图9b所示,经计算过桥槽夹角45°<ε<77°。排种试验发现舀种勺过桥槽夹角ε、舀种勺深度 d 均影响取种量的稳定性,以ε和d作为试验因素进行试验确定最佳参数。
3.4 舀种过程分析
种群直流舀种式胡麻精量穴播器的舀种过程尤为重要。根据舀种勺运动状态,舀种过程可分为:进种,舀取,回流。在舀种勺作用下,穴播器内腔胡麻种群可大致分为3层:充填区、伴随区、回流区,如图12所示。
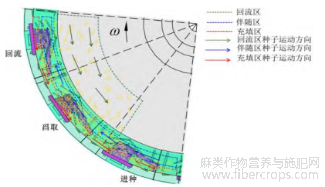
图12 舀种过程分析
进种:种子由导种管进入舀种区,种子堆积在播种滚筒内腔,将底部舀种勺“掩埋”。随着穴播器工作,种量逐渐减少,舀种勺填充不充分产生漏播。因此,从种群流动来看,种群朝舀种勺腔汇聚是种子被更好地舀取的关键。
舀取:种子在聚种斜槽作用下,充填区种群和伴随区种群发生相对运动,充填区种群沿种子流环形流动通道有序流动,伴随区种群由于底部充填区种群的运动,堆积状态逐渐坍塌。直流充种舀种勺安装在种子流环形流动通道平面内,种子流相对有序流动,直接充填舀种勺腔,提高舀种勺舀取成功率。此时种群中其他种子阻碍舀取种子,充填区种群朝舀种勺腔运动,并对舀取种子进行挤压。
回流:种群静止堆积状态被聚种斜槽和舀种勺的扰动作用打破后,一部分种群会跟随舀种勺一起向换位清种区运动,随着穴播器工作过程中舀种勺姿态的变化,跟随其运动的种群由于底部支持力的减弱,在自身重力作用下掉落,形成回流。回流区的种子朝穴播器滚筒运动相反的方向移动,而被舀取的种子继续跟随舀种勺运动脱离种群进入换位清种区。
在这3个过程中,穴播器中的种子在聚种斜槽的作用下,对种群进行汇聚,便于舀种勺舀取。直流充种舀种勺改变种群流动方向,缩短舀种时间,尤其改
善当穴播器种量较少时舀种勺充种困难的问题。因此,本研究重点设计和优化直流充种舀种勺、聚种斜槽的结构并确定其工作参数。
首先,对舀取阶段充填区种子进行受力分析,设种子进入舀种勺腔伴随穴播器一起运动,如图13所示。将种群视为一个整体,以种子流切线方向为x轴,垂直切线方向为y轴建立直角坐标系,种子能够被稳定舀取的临界条件为
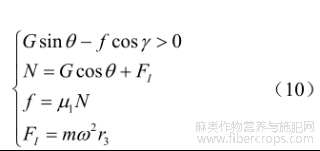
式中 θ——舀种角,°
为保证舀种勺舀取的种子随穴播器稳定运动,将种群压力忽略不计,将该条件代入式(10)可得:

由式(11)得,穴播器转动角速度ω与种子流动通道半径r3、舀种勺倾角γ、舀种角θ等因素有关。为保证舀种勺稳定舀种,舀种角θ<90°,由式(11)计算可知,ω<7.33 rad/s。
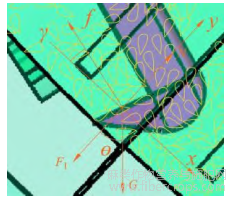
图13 舀种受力分析
3.5 舀种勺分布
当机组作业速度和株距一定时,舀种勺式穴播器的舀种频率取决于舀种勺数量和穴播器线速度。舀种勺数越多,穴播器转速越慢。单个舀种勺充种时间越长,更有利于舀种。故在不影响穴播器加工和舀种勺舀种作业的情况下,适当增加舀种勺数量。舀种勺数N需满足

式中 υm——机组作业速度,m/s
s ——株距,mm
c ——地轮滑移系数
υd——穴播器线速度,m/s
由式(12)可知,穴播器舀种勺数量与机组作业速度vm、播种株距s 、地轮滑移系数c 、穴播器线速度vd有关。试验地为砂土,滑移系数约为9.3%[28],机组作业速度为0.6m/s,参考《农业机械设计手册》,当穴播器的线速度不超过0.3 m/s 时,经计算舀种勺数 N >11,综合考虑确定舀种勺数量为13个,此时相邻舀种勺勺腔对应的中心角约为27.7°。
4 排种仿真试验
4.1 模型建立
为研究穴播器关键结构参数对排种性能的影响,课题组前期研究将胡麻种子进行多球聚合,建立胡麻颗粒模型进行仿真试验。该方法虽然能较好的模拟胡麻种子曲面轮廓,但计算效率较低。本研究基于EDEM 2022中多面体求解器功能,采用Solidworks软件建立胡麻三维模型,并将其以多面体模型导入EDEM 2022.3 中。胡麻种子物理参数和种间几乎无表面粘附力,选用 Hertz-Mindlin(no-slip)接触模型。为减少计算量,仿真过程中将穴播器圆周排种嘴和销钉紧固件删除,仿真模型如图14所示。
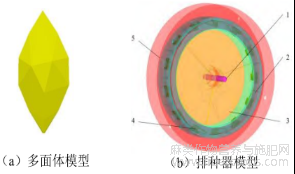
图14 排种仿真模型
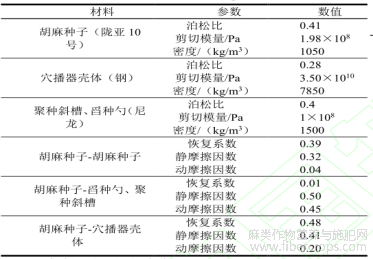
EDEM仿真过程中,由于胡麻多面体模型求解方式与多球聚合模型求解方式不同,在相关文献确定的仿真接触参数基础上对多面体模型相关接触参数进行对比验证。测定多面体模型堆积角,利用MATLAB软件提取堆积图像边界轮廓并进行线性拟合,通过计算拟合线斜率的反正切值即可得到胡麻种子的堆积角,实际堆积角轮廓边界处理如图15所示。试验5次取平均值确定胡麻实际堆积角为 21.86°。当采用前期测定的滚动摩擦因数进行堆积角仿真试验时,多面体模型所形成的堆积角小于实际堆积角,通过预试验发现改变其滚动摩擦因数对多面体模型堆积角效果影响不明显,因为多面体模型为滑动摩擦,多球聚合为滚动摩擦,滚动摩擦远远小于滑动摩擦。当改变其种间静摩擦因数可以更好的逼近实际堆积角,仿真堆积角轮廓边界处理如图16所示。当种间静摩擦因数为0.32时,试验5次取平均值确定胡麻仿真堆积角为22.34°,此时实际堆积角与仿真堆积角相对误差为 2.15%,满足胡麻仿真试验要求,故本研究将多面体胡麻模型种间静摩擦因数确定为0.32,胡麻种子与穴播器材料的相关仿真接触参数[29]见表 1。
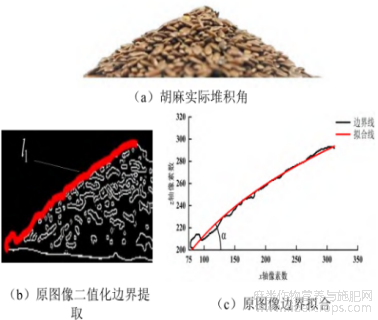
图15 实际堆积角图像处理过程

(a)胡麻仿真堆积角
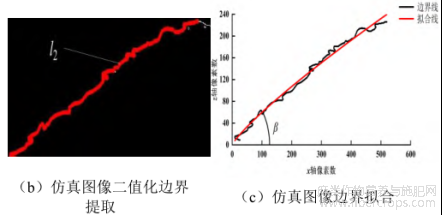
图16 仿真堆积角图像处理过程
表1 仿真接触参数
4.2 试验设计及评价方案
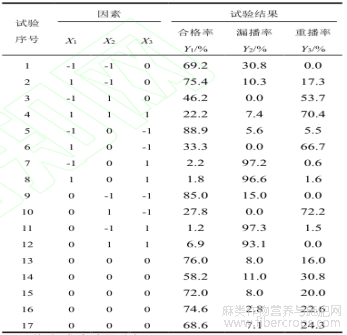
根据种群直流舀种式胡麻精量穴播器特点及理论分析,确定舀种勺深度、过桥槽夹角及穴播器角速度为试验因素,以穴粒数合格率、漏播率和重播率为评价指标。为研究试验因素是否存在交互影响及3个因素交互作用对种群直流舀种式胡麻精量穴播器工作性能的影响,采用二次旋转正交组合试验确定穴播器的最佳作业参数,试验因素编码如表2所示,由于缺乏指导胡麻精量穴播的标准,参考 标准GB/T6973-2005《单粒(精密)播种机试验方法》。穴粒数处于6~10粒之间,认为合格,当穴粒数小于6粒时,按漏播率计算,穴粒数大于10粒时,按重播率计算。试验结果如表3所示。
表2 试验因素编码
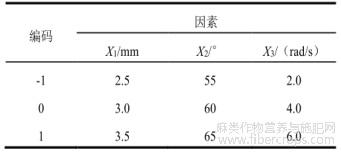
表3 试验结果
4.3 仿真试验结果分析
以1号试验为例,穴播器角速度为4rad/s,为保证穴播器工作一个周期,仿真时间取2s,EDEM仿真试验过程如图17所示。利用 Design-Expert13软件对本次仿真试验中穴播器工作时的合格率、漏播率和重播率进行方差分析,其显著性检验结果如表4所示。

图17 直流舀种勺EDEM仿真过程
表4 方差分析
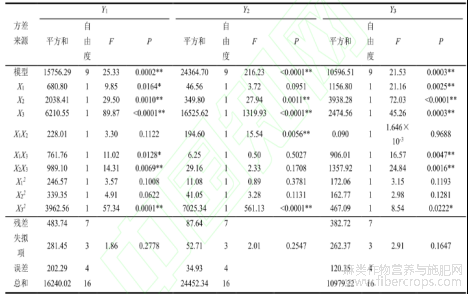
从表4中可得,合格率模型的拟合度极显著(P<0.01),其失拟项 P=0.2778,不显著(P>0.05),说明不存在其他影响合格率的主要因素,其回归方程不失拟。影响穴播器排种合格率的主次顺序为穴播器角速度X3、过桥槽夹角X2、舀种勺深度X1。X2、X3、X2X3、X32影响极显著,X1、X1X3影响显著,剔除交互项中不显著因素后的回归模型方程为

由表4可知,漏播率模型的拟合度极显著(P<0.01),其失拟项 P=0.2547,不显著(P>0.05),说明不存在其他影响漏播率的主要因素,影响穴播器漏播率的主次顺序为穴播器角速度X3、过桥槽夹角X2、舀种勺深度X1。X2、X3、X1X2、X32 影响极显著,剔除交互项中不显著因素后的回归模型方程为

由表4可知,重播率模型的拟合度极显著(P<0.01),其失拟项P=0.1647,不显著(P>0.05),说明不存在其他影响重播率的主要因素,影响穴播器重播率的主次顺序为过桥槽夹角X2、穴播器角速度X3 舀种勺深度X1。X1、X2、X3、X1X3、X2X3 影响极显著,X32 影响显著,剔除交互项中不显著因素后的回归模型方程为
![]()
4.4 交互项对合格率的影响
由表4可知舀种勺深度、过桥槽夹角、穴播器角速度之间的交互作用对合格率Y1 的影响显著,其响应曲面如图18所示。
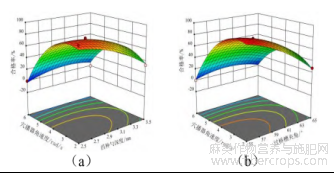
图18 因素交互项对合格率影响响应曲面
由图18(a)可知,当过桥槽夹角为60°时,穴播器角速度为3.0 ~4.0 rad/s,舀种勺深度为2.5~3.0mm,穴播器的合格率较大。当穴播器角速度一定时,随着舀种勺深度的增大,更多的种子被舀取,漏播率逐渐下降,合格率逐渐上升。当舀种勺深度过大时,舀取种子过多,重播率逐渐上升,合格率逐渐下降;当舀种勺深度一定时,随着穴播器角速度逐渐变大,舀种勺舀取的种子所受离心力随之增大,有利于穴播器的清种效果,重播率下降,合格率逐渐上升。当穴播器角速度过大时,舀种区的种群回流不及时导致漏播率逐渐上升,合格率逐渐下降。
由图18(b)可知,当舀种勺深度为3mm时,过桥槽夹角为55°~ 65°,穴播器角速度为3.0~4.0rad/s,穴播器的合格率较高。当穴播器角速度一定时,随着过桥槽夹角的增大,过桥清种区间通过过桥槽进入种室的种子越多,漏播率逐渐下降,合格率逐渐上升。过桥槽夹角过大时,种子可以顺利通过过桥槽进入种室,重播率逐渐上升,合格率逐渐下降。当过桥槽夹角一定时,随着舀种勺深度逐渐变大,舀种勺舀取的种子越多,有利于穴播器的充种效果,漏播率下降,合格率逐渐上升。当舀种勺深度过大时,舀种勺容积增大,舀种勺舀取种子量过多,重播率逐渐上升,合格率逐渐下降。
4.5 参数优化
为得到最佳的试验因素水平,结合试验因素的边界条件,通过式(13)~(15)回归方程模型优化求解。以穴粒数合格率最大,漏播率和重播率最小为目标,结合各因素试验取值边界条件,建立参数优化数学模型。其目标函数和约束条件为
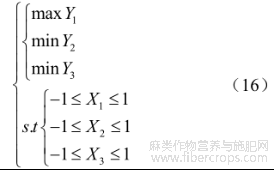
由上文可知,舀种勺深度为2.5~3.5mm,过桥槽夹角为55~65°,穴播器角速度为2 ~ 6 rad/s。将其代入式(16)可知:当舀种勺深度为2.75mm、过桥槽夹角为56.56°、穴播器角速度为2.71 rad/s 时,穴粒数合格率为94.27%,漏播率为5.67%,重播率为0.06%。
5 台架试验
为验证直流充种舀种勺结构和运动参数对穴播器排种性能的影响,对最优参数的直流充种舀种勺进行台架试验验证。试验地点为甘肃农业大学排种性能实验室,直流舀种勺和聚种斜槽通过3D打印,材料为尼龙,精度为0.1 mm,如图19。试验装置为JPS-12型排种器性能试验台,该试验台种间距测量精度为±2mm, 如图20。等试验台工作一定时间,穴播器角速度稳定之后开始计数,进行6组共记录300组数据,并计算出排种合格率、漏播率和重播率。试验结果见表5。
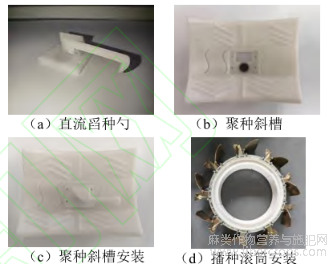
图19 种群直流舀种式胡麻精量穴播器
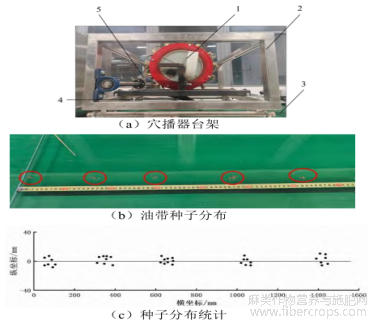
图20 穴播器台架试验
表5 台架试验结果
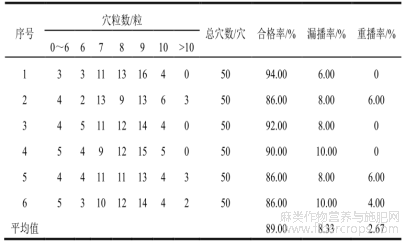
由表5可知,穴粒数合格率平均值为89.00%,漏播率平均值为8.33%,重播率平均值为2.67%。最佳工作参数组合下的舀种勺作业性能满足胡麻精量穴播对穴粒数合格率、漏播率和重播率的要求。为进一步验证种群直流舀种式胡麻精量穴播器的实际排种性能,将舀种勺舌式胡麻精量穴播器与种群直流舀种式胡麻精量穴播器进行台架对比试验。设置穴播器角速度分别为2.6、2.8、3.0、3.2、3.4 rad/s,两种舀种勺参数采用试验得出最佳参数,试验指标为排种合格率,漏播率和重播率,每组进行3次,取平均值,试验方法同上,试验结果如表6所示。
表6 两种穴播器试验结果对比
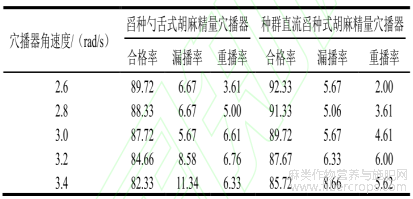
由表6可知,穴播器角速度在 2.6、2.8、3.0、3.2、3.4 rad/s时,安装直流舀种勺的穴播器相比安装勺舌式舀种勺的穴播器,排种合格率整体上升,最大可提高3.39个百分点;漏播率和重播率整体下降,漏播率最大下降2.68个百分点;重播率最大下降2个百分点。由此可见,直流舀种勺的排种效果优于勺舌式舀种勺的排种效果。
6 结论
(1)本文设计了一种种群直流舀种式胡麻精量穴播器。通过对穴播器工作原理和聚种斜槽聚种、扰种左右理论分析,确定聚种斜槽垂直高度为30mm,倾角为50°,宽度为70mm,滑种侧板垂直高度为20mm,宽度为3mm;舀种勺高度为 30mm,过桥槽高度为3mm,长度为30mm。
(2)通过二次旋转正交组合仿真试验分析舀种勺深度、过桥槽夹角和穴播器角速度对排种性能的影响,试验得到,最优参数组合: 舀种勺深度为2.75mm、过桥槽夹角为56.56°、排种轮角速度为2.71rad/s,此时穴粒数合格率为 94.27%,漏播率为5.67%,重播率为0.06%。
(3)将最优参数组合舀种勺3D打印制作进行排种性能台架试验,试验结果表明:穴粒数合格率平均值为89.00%,漏播率平均值为8.33%,重播率平均值为 2.67%,其台架试验与仿真试验结果基本一致;台架对比试验表明,在不同作业速度下,安装直流舀种勺的穴播器相对于安装勺舌式舀种勺的穴播器合格率最大可提高3.39个百分点,漏播率最大可下降2.68个百分点,重播率最大可下降2 个百分点,表明种群直流舀种式胡麻精量穴播器更适于胡麻穴播。
参考文献
[1]KAMGAR S,NOEI K F,SHAFAEI S M.Design development and field assessment of a controlled seed metering unit to be used in grain drills for direct seeding of wheat[J].Information Processing in Agriculture,2015,2:169-176.
[2]LI H,LIU H,ZHOU J,et al.Development and first results of a no-till pneumatic seeder for maize precise sowing in Huang-Huai-Hai
plain of China[J].Agriculture,2021,11:1023.
[3]吴明亮,官春云,高晓燕,等.偏心轮型孔轮式排种器排种油菜极限转速试验[J].农业工程学报,2010,26(6):119-123.
[4]刘彩玲,魏丹,都鑫,等.宽苗带勾型窝眼轮式小麦精量排种器设计与试验[J].农业机械学报,2019,50(1):75-84.
[5]赖庆辉,贾广鑫,苏微,等.基于DEM-MBD耦合的链勺式人参精密排种器研究[J].农业机械学报,2022,53(3):91-104.
[6]LAO Y T,WANG L,LAO Q X.Design and test of an inside-filling pneumatic precision centralized seed-metering device for rapeseed[J].International Journal of Agricultural and Biological Engineering,2017,10:56-62.
[7]伍皖闽,陈学庚,王士国,等.组合型孔轮式玉米精量穴播器设计与试验[J].农业机械学报,2022,53(3):60-70.
[8]赖庆辉,于庆旭,苏微,等.三七超窄行气吸式精密排种器设计与试验[J].农业机械学报,2019,50(4):102-112.
[9]廖宜涛,郑娟,廖庆喜,等.正负气压组合管针式西洋参集排器设计与试验[J].农业机械学报,2019,50(3):46-57.
[10]李兆东,杨文超,武尧尧,等.油菜气力盘式精量排种器槽齿辅助充种性能分析与试验[J].农业工程学报,2020,36(20):57-66.
[11]胡梦杰,夏俊芳,郑侃,等.内充气力式棉花高速精量排种器设计与试验[J].农业机械学报,2021,52(8):73-85.
[12]李晓红,刘晓丽,刘龙,等.基于响应面法的电控可调节窝眼轮式排种器的优化设计[J].大豆科学,2020,39(2):304-310.
[13]刘亚夫,吴志立,聂也之,等.基于EDEM的双排型孔轮式油菜排种器的排种性能分析[J].湖南农业大学学报(自然科学版),2019,45(5):554-559.
[14]袁文胜,吴崇友,金诚谦.异形孔窝眼轮式油菜排种器设计与试验[J].农业机械学报,2009,40(5):72-75.
[15]邢赫,王在满,罗锡文,等.气力式水稻穴播机播种精度与田间成苗率关系的试验研究[J].农业工程学报,2018,34(9):42-48.
[16]SINGH R C,SINGH C X,SARASWAT X,et al.Optimization of design and operational parameters of a pneumatic seed metering device for planting of groundnut (Arachis hypogaea) seeds[J].lndian Journal of Agricultural Sciences,2007,77(1):40-42.
[17]RATNAYAKE R M,BALASORIYA B.Re-design,fabrication,and performance evaluation of manual conical drum seeder:a case study[J].Applied Engineering in Agriculture,2013,29(2):139-147.
[18]张青松,余琦,王磊,等.油菜勺式精量穴播排种器设计与试验[J].农业机械学报,2020,51(6):47-54+64.
[19]张顺,李勇,王浩宇,等.U型腔道式水稻精量穴播排种器设计与试验[J].农业机械学报,2020,51(10):98-108.
[20]张国忠,张沙沙,杨文平,等.双腔侧充种式水稻精量穴播排种器的设计与试验[J].农业工程学报,2016,32(8):9-17.
[21]石林榕,赵武云.西北寒旱农区胡麻滚勺式精量穴播器的设计及试验[J].吉林大学学报(工学版),2023,53(9):2706-2717.
[22]张国忠,臧英,罗锡文,等.粳稻穴播排种器直线型搅种装置设计及排种精度试验[J].农业工程学报,2014,30(17):1-9.
[23]郭军海,赵武云,石林榕,等.西北旱区滚勺式胡麻联合播种机的设计与试验[J].中国农业大学学报,2022,27(7):184-198.
[24]LIU Hongxin,GUO Lifeng,FU Lulu,et al.Study on multi-size seed-metering device for vertical plate soybean precision planter[J].International Journal of Agricultural and Biological Engineering,2015,8(1):1-8.
[25]石林榕,马周泰,赵武云,等.胡麻籽粒离散元仿真参数标定与排种试验验证[J].农业工程学报,2019,35(20):25-33.
[26]张国忠,罗锡文,臧英,等.水稻气力式排种器群布吸孔吸种盘吸种精度试验[J].农业工程学报,2013,29(6):13-20.
[27]张明华,姜有聪,何思禹,等.蔬菜气吸轮式精量排种器设计与试验[J].农业工程学报,2023,39(7):98-109.
[28]顾玲丽.花生穴播器关键部件设计与试验研究[D].南京:南京农业大学,2016.
[29]曲浩.全膜覆盖胡麻精量穴播联合作业机设计与试验[D].兰州:甘肃农业大学,2022.
文章摘自:李辉,赵武云,石林榕,等.种群直流舀种式胡麻精量穴播器设计与试验[J/OL].农业机械学报,1-13[2024-09-08].http://kns.cnki.net/kcms/detail/11.1964.s.20240729.1333.013.html.
