作者:陈涛等
来源:
发布时间:2021-10-14
Tag:
点击:
[麻专利]剑麻农药喷洒装置
摘 要:本发明公开了一种剑麻农药喷洒装置,涉及剑麻种植机械设备领域,包括行进底座,行进底座为具有履带行进装置的底座,行进底座的上面固定设置有机架,机架上面分别设置有药桶和升降杆;升降杆的顶部设置有喷洒装置,喷洒装置上设置有喷头,喷头通过管道及水泵与药桶相互连通。本发明通过行进底座、机架、药桶、升降杆以及喷洒装置的有机结合构成剑麻农药喷洒装置,通过远程控制可以在剑麻地中自由穿梭,观察、喷药,还能够根据具体情况升降、伸缩,以达到剑麻不同角度的农药喷洒效果,解决了现有技术如无人机或者定点喷洒的方式,无法完全覆盖整个叶片,另外,由于剑麻叶带有针刺,人工喷洒容易出现事故还很疲劳的问题。
技术要点
1.一种剑麻农药喷洒装置,其特征在于:包括行进底座(1)、机架(2)、药桶(3)、升降杆(4)以及喷洒装置(5);
所述行进底座(1)为具有履带行进装置的底座,其内部设置有驱动电动机以及控制电路,行进底座(1)的两侧分别设置有履带;
所述行进底座(1)的上面固定设置有机架(2),所述机架(2)上面分别设置有药桶(3)和升降杆(4);所述升降杆(4)位于所述机架(2)的中部,所述药桶(3)设置有多个,分别对称设置在所述升降杆(4)的两侧;
所述升降杆(4)的顶部设置有所述喷洒装置(5),所述喷洒装置(5)上设置有喷头,所述喷头通过管道及水泵与所述药桶(3)相互连通。
2.根据权利要求1所述的剑麻农药喷洒装置,其特征在于:
所述机架(2)包括机架本体(20),所述机架本体(20)呈U形结构,其倒扣在所述行进底座(1)上;
所述机架本体(20)的两侧通过合页固定有机架翼板(21),所述机架翼板(21)的两侧与所述机架本体(20)的可转动设置有加强连杆(22);所述机架翼板(21)的上面设置有所述药桶(3)。
3.根据权利要求2所述的剑麻农药喷洒装置,其特征在于:所述药桶(3)为中空圆柱体结构,其内放置有钢珠;
所述机架翼板(21)采用铝合金材料制成,其底部固定设置有搅拌电机(23);所述搅拌电机(23)的输出转轴上设置有十字结构的磁力架,所述磁力架上固定设置有多个永磁体,该永磁体能够吸引所述钢珠。
4.根据权利要求1所述的剑麻农药喷洒装置,其特征在于:
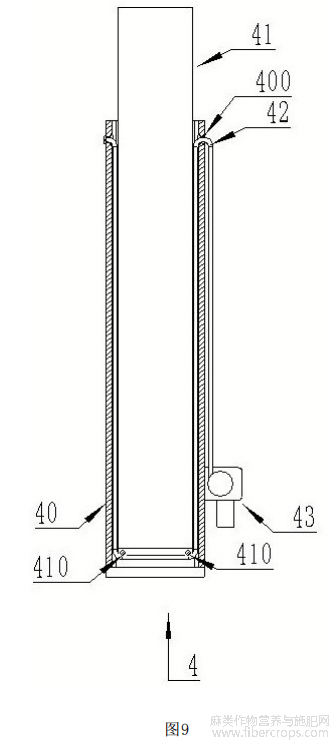
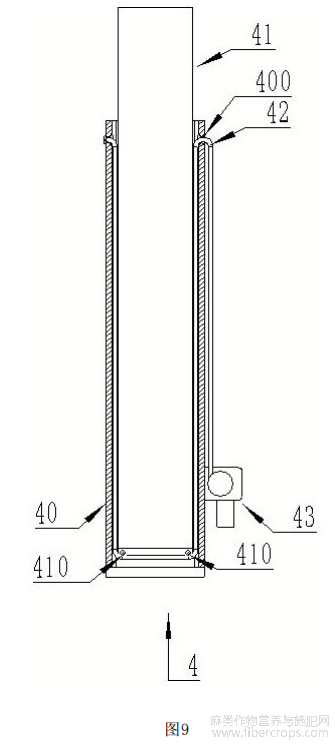
所述升降杆(4)包括固定套管(40),所述固定套管(40)为中空方形管材制成,其顶部两侧对称开设有绳孔(400),所述绳孔(400)内穿设有拉绳(42);
所述固定套管(40)的外侧底部固定设置有卷绳电机(43),所述卷绳电机(43)的输出转轴上固定套设有卷绳轮,所述卷绳轮上绕设有所述拉绳(42);
所述固定套管(40)内可滑动设置有活动杆(41),所述喷洒装置(5)固定设置在所述活动杆(41)的顶部。
5.根据权利要求4所述的剑麻农药喷洒装置,其特征在于:所述活动杆(41)为方形结构,其与所述固定套管(40)的内孔相互对应;
所述活动杆(41)的底部两侧可转动设置有滑轮(410),所述滑轮(410)呈哑铃状,其上绕过所述拉绳(42)。
6.根据权利要求1所述的剑麻农药喷洒装置,其特征在于:
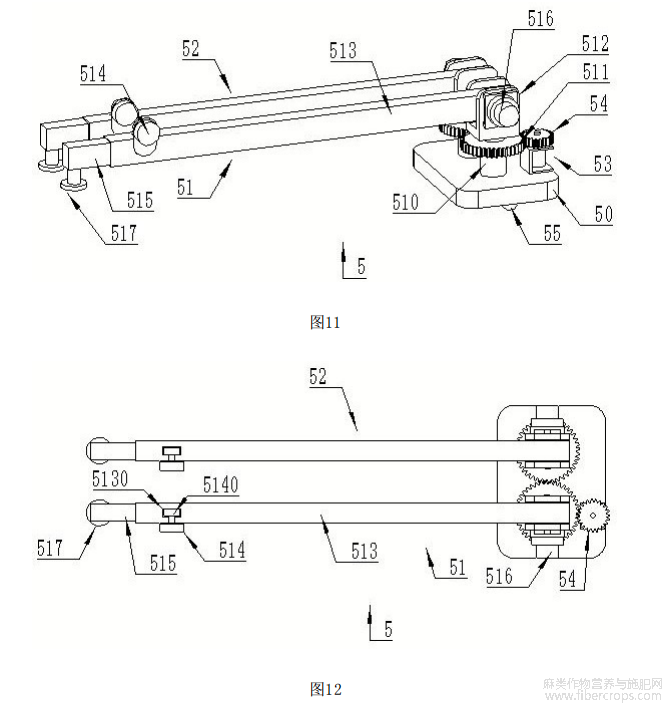
所述喷洒装置(5)包括喷洒底座(50),所述喷洒底座(50)为板状结构,其上面固定设置有第一转动喷洒伸缩杆(51)和第二转动喷洒伸缩杆(52)以及喷杆旋转驱动电机(53);所述第一转动喷洒伸缩杆(51)和第二转动喷洒伸缩杆(52)结构、尺寸完全一致;
所述第一转动喷洒伸缩杆(51)包括固定转轴(510),所述固定转轴(510)上面可转动设置有旋转齿轮(511),所述旋转齿轮(511)上面固定设置有摇臂座(512);所述摇臂座(512)为U形结构,摇臂座(512)外侧固定设置有摇臂电机(516),所述摇臂电机(516)的转轴穿设于所述摇臂座(512);摇臂座(512)内设置有摇臂(513),所述摇臂(513)的一端与所述摇臂电机(516)的转轴固定连接;所述摇臂(513)为中空方管结构,其内可伸缩设置有摇臂伸缩杆(515);所述摇臂伸缩杆(515)的端部固定设置有喷头(517);所述喷杆旋转驱动电机(53)的输出转轴上固定套设有主动齿轮(54);所述主动齿轮(54)与所述旋转齿轮(511)相互啮合;所述旋转齿轮(511)右与第二转动喷洒伸缩杆(52)的旋转齿轮相互啮合。
7.根据权利要求6所述的剑麻农药喷洒装置,其特征在于:所述摇臂(513)的另一端上面开设有摩擦轮槽(5130);
所述摇臂(513)上固定设置有摇臂伸缩驱动电机(514),所述摇臂伸缩驱动电机(514)的输出转轴上固定设置有摩擦轮(5140),所述摩擦轮(5140)的一部分穿过所述摩擦轮槽(5130)与所述摇臂伸缩杆(515)相互接触。
8.根据权利要求6所述的剑麻农药喷洒装置,其特征在于:所述喷洒底座(50)的底部两侧分别固定设置有一个摄像头。
9.根据权利要求1所述的剑麻农药喷洒装置,其特征在于:
还包括无线通讯模块,该无线通讯模块与控制电路板连接,能通过无线电波与远程控制站无线连接,并根据远程控制站的指令执行控制命令。
10.根据权利要求1所述的剑麻农药喷洒装置,其特征在于:所述药桶(3)采用塑料材料制成。
技术领域
本发明涉及剑麻种植机械设备领域,尤其涉及一种剑麻农药喷洒装置。
背景技术
剑麻又名菠萝麻,龙舌兰科龙舌兰属,是一种多年生热带硬质叶纤维作物,其原产墨西哥,现主要在非洲、拉丁美洲、亚洲等地种植,是当今世界用量最大,范围最广的一种硬质纤维。剑麻纤维质地坚韧,耐磨、耐盐碱、耐腐蚀,广泛运用在运输、渔业、石油、冶金等各种行业,具有重要的经济价值。世界剑麻进出口贸易在不断增长,而中国目前自产的剑麻纤维却不能满足国内的需要,并且随着剑麻纤维用途的不断增加,中国每年都在增加剑麻纤维的进口量。同时剑麻还有重要的药用价值。剑麻种植过程中,会出去病虫害,由于剑麻的特点是叶片一面朝上,另一面在下,用常见的如无人机或者定点喷洒的方式,无法完全覆盖整个叶片,另外,由于剑麻叶带有针刺,人工喷洒容易出现事故还很疲劳。
发明内容
为解决上述问题,本发明采用如下技术方案实现:
一种剑麻农药喷洒装置,包括行进底座、机架、药桶、升降杆以及喷洒装置;
所述行进底座为具有履带行进装置的底座,其内部设置有驱动电动机以及控制电路,行进底座的两侧分别设置有履带;这是比较成熟的半成品,可以在市场上采购,不需要过多设计加工即可使用,这样可以降低设计和制作的成本。
所述行进底座的上面固定设置有机架,机架可以是一块板材结构,也可以是其他结构,通过螺栓固定在行进底座的上面。所述机架上面分别设置有药桶和升降杆;所述升降杆位于所述机架的中部,所述药桶设置有多个,分别对称设置在所述升降杆的两侧;这样的结构可以使得整个装置保持平衡,不容易出现倾覆。
所述升降杆的顶部设置有所述喷洒装置,所述喷洒装置上设置有喷头,所述喷头通过管道及水泵与所述药桶相互连通。
优选地,所述机架包括机架本体,所述机架本体呈U形结构,其倒扣在所述行进底座上;
所述机架本体的两侧通过合页固定有机架翼板,这样的结构可以在运输过程中折叠机架翼板,使得整个装置的体积变小,方便携带和运输。所述机架翼板的两侧与所述机架本体的可转动设置有加强连杆;加强连杆是端部开设有挂孔的杆状结构,用于加强机架翼板的承重能力。
所述机架翼板的上面设置有所述药桶。药桶可以是通过扣设固定,或者利用具有弹性的皮筋进行固定,这样比较方便拆卸。
优选地,所述药桶为中空圆柱体结构,其内放置有钢珠;
所述机架翼板采用铝合金材料制成,其底部固定设置有搅拌电机;所述搅拌电机的输出转轴上设置有十字结构的磁力架,所述磁力架上固定设置有多个永磁体,该永磁体能够吸引所述钢珠。搅拌电机可以采用轴流风机的结构设计,将叶片改成磁力架即可,这样结构扁平,体积小,方便安装。搅拌电机与控制电路板连接。工作的时候,搅拌电机带动磁力架转动,磁力架上的永磁体带动药桶内的钢珠转动,从而对药桶内的药液进行搅拌防止沉淀,影响药效。
优选地,所述升降杆包括固定套管,所述固定套管为中空方形管材制成,其顶部两侧对称开设有绳孔,所述绳孔内穿设有拉绳;
所述固定套管的外侧底部固定设置有卷绳电机,所述卷绳电机的输出转轴上固定套设有卷绳轮,所述卷绳轮上绕设有所述拉绳;
所述固定套管内可滑动设置有活动杆,所述喷洒装置固定设置在所述活动杆的顶部。通过卷绳电机带动卷绳轮转动,拉动拉绳在固定套管内上下移动,从而带动活动杆也上下滑动,这样的结构比较简单,容易控制。
优选地,所述活动杆为方形结构,其与所述固定套管的内孔相互对应;
所述活动杆的底部两侧可转动设置有滑轮,所述滑轮呈哑铃状,其上绕过所述拉绳。这样的结构,可以减小拉绳与活动杆底部的摩擦力,增加拉绳的寿命。
优选地,所述喷洒装置包括喷洒底座,所述喷洒底座为板状结构,其上面固定设置有第一转动喷洒伸缩杆和第二转动喷洒伸缩杆以及喷杆旋转驱动电机;所述第一转动喷洒伸缩杆和第二转动喷洒伸缩杆结构、尺寸完全一致;
所述第一转动喷洒伸缩杆包括固定转轴,所述固定转轴上面可转动设置有旋转齿轮,所述旋转齿轮上面固定设置有摇臂座;所述摇臂座为U形结构,摇臂座外侧固定设置有摇臂电机,所述摇臂电机的转轴穿设于所述摇臂座;摇臂座内设置有摇臂,所述摇臂的一端与所述摇臂电机的转轴固定连接;所述摇臂为中空方管结构,其内可伸缩设置有摇臂伸缩杆;所述摇臂伸缩杆的端部固定设置有喷头;所述喷杆旋转驱动电机的输出转轴上固定套设有主动齿轮;所述主动齿轮与所述旋转齿轮相互啮合;
所述旋转齿轮右与第二转动喷洒伸缩杆的旋转齿轮相互啮合。这样的结构,可以仅利用一台电机就可以实现第一转动喷洒伸缩杆和第二转动喷洒伸缩杆的转动控制,二者转向相反,在剑麻地里升起后可以构成T形结构,对剑麻上面的叶片进行喷洒。想要对剑麻叶片底部喷洒时,可以控制摇臂电机将摇臂向上竖立甚至转动180度将喷头朝上即可,这种结构控制简单,方便操作。
优选地,所述摇臂的另一端上面开设有摩擦轮槽;
所述摇臂上固定设置有摇臂伸缩驱动电机,所述摇臂伸缩驱动电机的输出转轴上固定设置有摩擦轮,所述摩擦轮的一部分穿过所述摩擦轮槽与所述摇臂伸缩杆相互接触。通过控制摇臂伸缩驱动电机正反转,能够带动摩擦轮正反转从而带动摇臂伸缩杆沿着摇臂伸缩。由于摇臂不需要太多东西,重量很轻,这样的结构可以满足伸缩的需求,而且结构简单方便操作。
优选地,所述喷洒底座的底部两侧分别固定设置有一个摄像头。
优选地,还包括无线通讯模块,该无线通讯模块与控制电路板连接,能通过无线电波与远程控制站无线连接,并根据远程控制站的指令执行控制命令。
优选地,所述药桶采用塑料材料制成。这样的结构不会影响磁力的穿透。
本发明通过行进底座、机架、药桶、升降杆以及喷洒装置的有机结合构成剑麻农药喷洒装置,通过远程控制可以在剑麻地中自由穿梭,观察、喷药,还能够根据具体情况升降、伸缩,以达到剑麻不同角度的农药喷洒效果,解决了现有技术如无人机或者定点喷洒的方式,无法完全覆盖整个叶片,另外,由于剑麻叶带有针刺,人工喷洒容易出现事故还很疲劳的问题。
附图说明
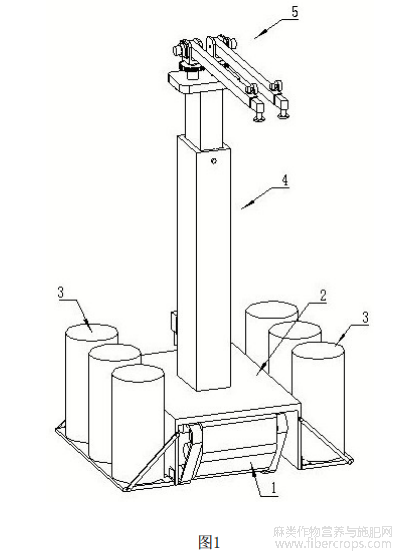
图1是本发明提供的实施例总体结构示意图;
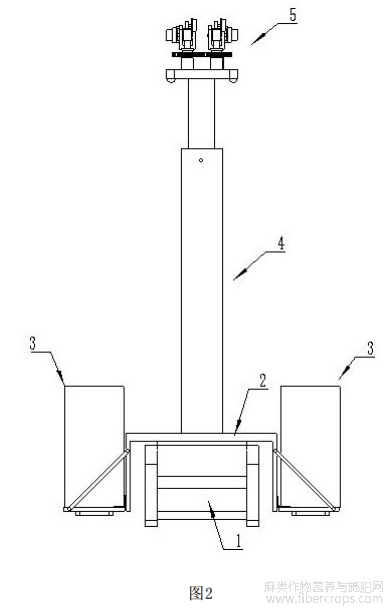
图2是本发明提供的实施例主视图;
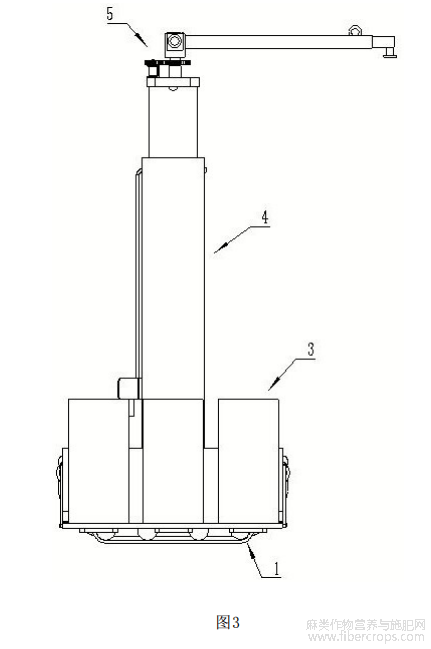
图3是本发明提供的实施例左视图;
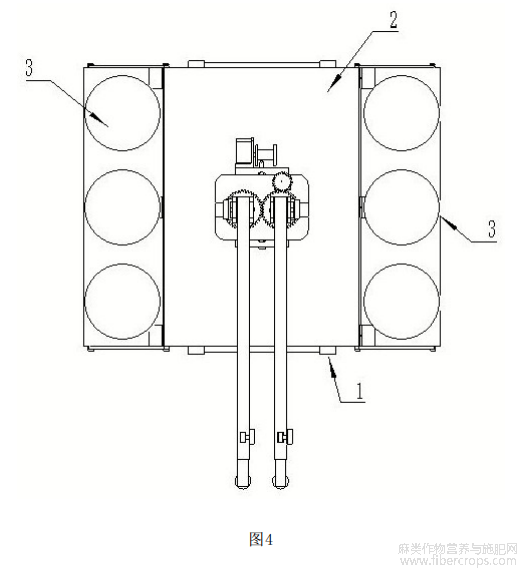
图4是本发明提供的实施例俯视图;
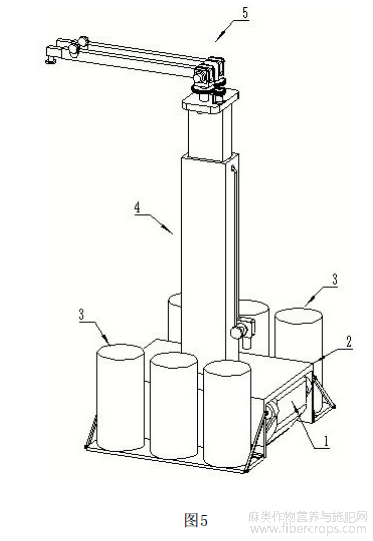
图5是本发明提供的实施例另一个视角的立体图;
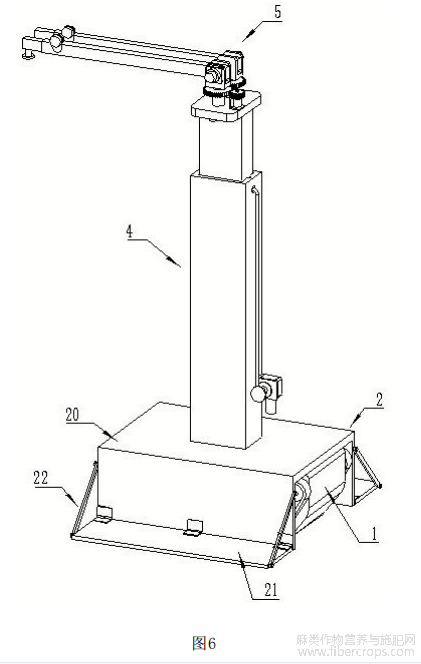
图6是本发明提供的实施例拆除药桶后的示意图;
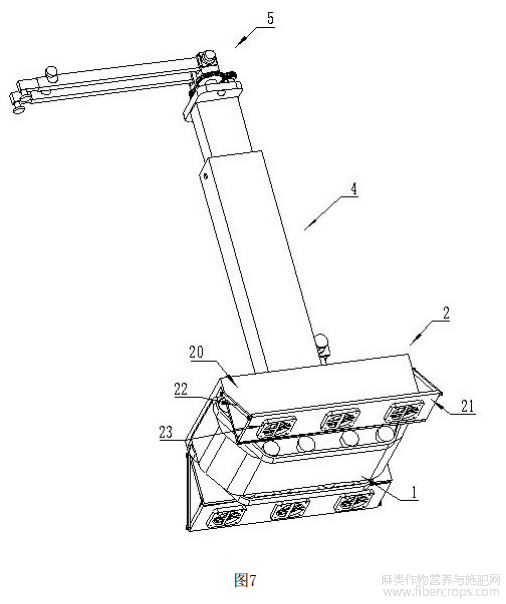
图7是本发明提供的实施例拆除药桶后从底部观察的示意图;
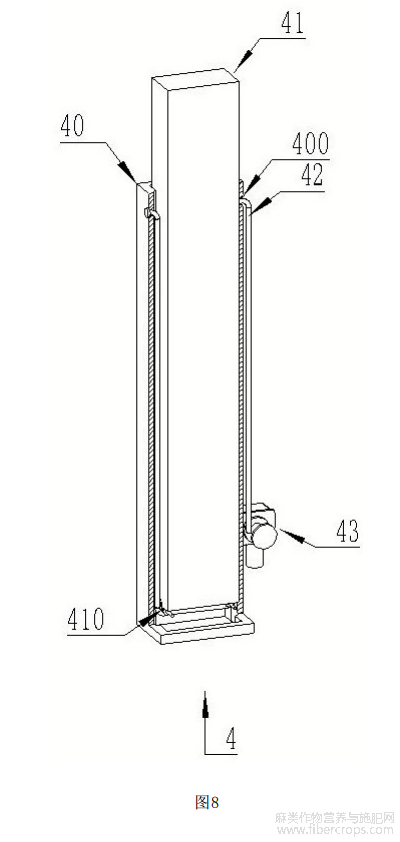
图8是本发明提供的实施例中升降杆的剖视图;
图9是图8的主视图;
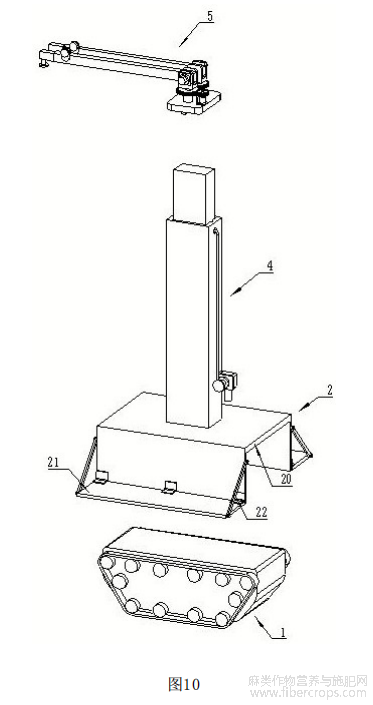
图10是本发明提供的实施各个部件的拆解位置图;
图11是本发明提供的实施例中喷洒装置的立体示意图;
图12是本发明提供的实施例中喷洒装置的俯视图。
具体实施方式
为使本申请实施方式的目的、技术方案和优点更加清楚,下面将结合本申请实施方式中的图1~12,对本申请实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本申请一部分实施方式,而不是全部的实施方式。基于本申请中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本申请保护的范围。因此,以下对在附图中提供的本申请的实施方式的详细描述并非旨在限制要求保护的本申请的范围,而是仅仅表示本申请的选定实施方式。在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本申请的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本申请中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本申请中的具体含义。
在本申请中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
如图1~5所示,一种剑麻农药喷洒装置,包括行进底座1、机架2、药桶3、升降杆4以及喷洒装置5。行进底座1为具有履带行进装置的底座,其内部设置有驱动电动机以及控制电路,行进底座1的两侧分别设置有履带。这是比较成熟的半成品,可以在市场上采购,不需要过多设计加工即可使用,这样可以降低设计和制作的成本。
行进底座1的上面固定设置有机架2,机架2可以是一块板材结构,也可以是其他结构,通过螺栓固定在行进底座1的上面。如图6和图7所示,本实施例中优选:机架2包括机架本体20,机架本体20呈U形结构,其倒扣在行进底座1上。机架本体20的两侧通过合页固定有机架翼板21,这样的结构可以在运输过程中折叠机架翼板21,使得整个装置的体积变小,方便携带和运输。机架翼板21的两侧与机架本体20的可转动设置有加强连杆22。加强连杆22是端部开设有挂孔的杆状结构,用于加强机架翼板21的承重能力。两侧的机架翼板21的上面分别设置有3个药桶3。药桶3可以是通过扣设固定,或者利用具有弹性的皮筋进行固定,这样比较方便拆卸。药桶3为中空圆柱体结构,其内放置有钢珠。药桶3采用塑料材料制成。这样的结构不会影响磁力的穿透。机架翼板21采用铝合金材料制成,其底部固定设置有搅拌电机23。搅拌电机23的输出转轴上设置有十字结构的磁力架,磁力架上固定设置有多个永磁体,该永磁体能够吸引钢珠。搅拌电机23可以采用轴流风机的结构设计,将叶片改成磁力架即可,这样结构扁平,体积小,方便安装。搅拌电机23与控制电路板连接。工作的时候,搅拌电机23带动磁力架转动,磁力架上的永磁体带动药桶内的钢珠转动,从而对药桶内的药液进行搅拌防止沉淀,影响药效。
机架2上面固定设置有升降杆4。升降杆4位于机架2的中部,药桶3应当分别对称设置在升降杆4的两侧。这样的结构可以使得整个装置保持平衡,不容易出现倾覆。
如图8和图9所示,升降杆4包括固定套管40,固定套管40为中空方形管材制成,其顶部两侧对称开设有绳孔400,绳孔400内穿设有拉绳42。固定套管40的外侧底部固定设置有卷绳电机43,卷绳电机43的输出转轴上固定套设有卷绳轮,卷绳轮上绕设有拉绳42。固定套管40内可滑动设置有活动杆41,喷洒装置5固定设置在活动杆41的顶部。通过卷绳电机43带动卷绳轮转动,拉动拉绳42在固定套管40内上下移动,从而带动活动杆41也上下滑动,这样的结构比较简单,容易控制。此外,活动杆41为方形结构,其与固定套管40的内孔相互对应。活动杆41的底部两侧可转动设置有滑轮410,滑轮410呈哑铃状,其上绕过拉绳42。这样的结构,可以减小拉绳42与活动杆41底部的摩擦力,增加拉绳的寿命。
如图11和图12所示,喷洒装置5包括喷洒底座50,喷洒底座50为板状结构,其上面固定设置有第一转动喷洒伸缩杆51和第二转动喷洒伸缩杆52以及喷杆旋转驱动电机53。第一转动喷洒伸缩杆51和第二转动喷洒伸缩杆52结构、尺寸完全一致。此处仅对其中的第一转动喷洒伸缩杆51进行详细介绍。第一转动喷洒伸缩杆51包括固定转轴510,固定转轴510上面可转动设置有旋转齿轮511,旋转齿轮511上面固定设置有摇臂座512。摇臂座512为U形结构,摇臂座512外侧固定设置有摇臂电机516,摇臂电机516的转轴穿设于摇臂座512。摇臂座512内设置有摇臂513,摇臂513的一端与摇臂电机516的转轴固定连接。摇臂513为中空方管结构,其内可伸缩设置有摇臂伸缩杆515。摇臂伸缩杆515的端部固定设置有喷头517。喷杆旋转驱动电机53的输出转轴上固定套设有主动齿轮54。主动齿轮54与旋转齿轮511相互啮合。旋转齿轮511右与第二转动喷洒伸缩杆52的旋转齿轮相互啮合。这样的结构,可以仅利用一台电机就可以实现第一转动喷洒伸缩杆51和第二转动喷洒伸缩杆52的转动控制,二者转向相反,在剑麻地里升起后可以构成T形结构,对剑麻上面的叶片进行喷洒。想要对剑麻叶片底部喷洒时,可以控制摇臂电机516将摇臂向上竖立甚至转动180度将喷头朝上即可,这种结构控制简单,方便操作。
此外,摇臂513的另一端上面开设有摩擦轮槽5130。摇臂513上固定设置有摇臂伸缩驱动电机514,摇臂伸缩驱动电机514的输出转轴上固定设置有摩擦轮5140,摩擦轮5140的一部分穿过摩擦轮槽5130与摇臂伸缩杆515相互接触。通过控制摇臂伸缩驱动电机514正反转,能够带动摩擦轮5140正反转从而带动摇臂伸缩杆515沿着摇臂513伸缩。由于摇臂不需要太多东西,重量很轻,这样的结构可以满足伸缩的需求,而且结构简单方便操作。
为了便于操作人员观察和控制,喷洒底座50的底部两侧分别固定设置有一个摄像头。还应当设置有无线通讯模块,该无线通讯模块与控制电路板连接,能通过无线电波与远程控制站无线连接,并根据远程控制站的指令执行控制命令。
工作的时候,操作人员将农药搅拌好放入药桶3中,并固定在机架2上,然后将装置放置到剑麻地上。接着通过无线遥控控制装置的履带装置移动进入到剑麻地内部,并遥控升降杆4以及喷洒装置5对剑麻进行喷淋。本发明通过行进底座1、机架2、药桶3、升降杆4以及喷洒装置5的有机结合构成剑麻农药喷洒装置,通过远程控制可以在剑麻地中自由穿梭,观察、喷药,还能够根据具体情况升降、伸缩,以达到剑麻不同角度的农药喷洒效果,解决了现有技术如无人机或者定点喷洒的方式,无法完全覆盖整个叶片,另外,由于剑麻叶带有针刺,人工喷洒容易出现事故还很疲劳的问题。
摘自国家发明专利,发明人:陈涛,覃旭,彭欣怡,黄显雅,金刚,吴密,杨祥燕,刘明,崔明勇,陈庆南,陆勇,晏洪钟,黄尚超,申请号202011474917.7,申请日2020.12.15
更多阅读
Copyright by Ramie Research Institute of Hunan Agricultural University
湖南农业大学农学院/苎麻研究所 版权所有 2009-2016 湘ICP备10006838号-1
