摘 要:本发明公开了一种苎麻收割机刀片,该苎麻收割机包括有机身、设置在机身前方用于切割苎麻根茎的割刀机构,割刀机构包括布置架、固定设置于布置架下部的定刀组、设置于布置架上部的驱动机构、以及由驱动机构驱动进行水平活动并在上方与定刀组贴合的动刀组;定刀组和动刀组均包括水平均匀紧凑排列设置的若干切割刀片,切割刀片的横向截面呈等腰三角形,并且两腰朝前形成用于切割苎麻根茎的刃口,该两腰的夹角角度为20-30度,该两腰延伸朝前的角设置为不会插入苎麻根茎的平面,刃口设置为锯齿刃。本发明采用上下设置的动刀组和定刀组进行水平交叉剪切,具体设置的刀片形状与角度,可轻松平整的切断根茎,进行稳定的卡位剪切,根茎不会偏移。
技术要点
1.苎麻收割机刀片,该苎麻收割机包括有机身、设置在机身前方用于切割苎麻根茎的割刀机构,其特征在于:所述割刀机构包括布置架、固定设置于布置架下部的定刀组、设置于布置架上部的驱动机构、以及由驱动机构驱动进行水平活动并在上方与定刀组贴合的动刀组;所述定刀组和动刀组均包括水平均匀紧凑排列设置的若干切割刀片,所述切割刀片的横向截面呈等腰三角形,并且两腰朝前形成用于切割苎麻根茎的刃口,该两腰的夹角角度为20-30度,该两腰延伸朝前的角设置为不会插入苎麻根茎的平面,所述刃口设置为锯齿刃。
2.根据权利要求1所述的苎麻收割机刀片,其特征在于:所述驱动机构包括步进电机、与步进电机连接传动的左传动部、以及通过联动部与左传动部进行同步传动的右传动部,所述左传动部和右传动部向前连接一动架,所述动架上设置动刀组,所述步进电机在工作时带动左传动部和右传动部进行同步传动令动架进行左右往复运动。
3.根据权利要求2所述的苎麻收割机刀片,其特征在于:所述左传动部和右传动部均包括可旋转设置于布置架上的转轴、设置于转轴下部的转盘、以及转动连接于转盘圆周上的摆杆,左传动部的转轴与步进电机的电机轴进行同轴连接;所述联动部包括设置于两个转轴上的齿轮以及连接两个链轮进行传动的链条;所述摆杆相对转盘的另一端转动连接于动架上,当转盘被带动进行旋转时,驱动圆周上的摆杆进行绕圈摆动,从而带动动架进行左右往复的摆动运动。
4.根据权利要求3所述的苎麻收割机刀片,其特征在于:所述转盘与摆杆之间、摆杆与动架之间均通过关节轴承进行连接;所述动架包括用于安装定刀组的横动架以及安装在横动架上并向后延伸的竖动架,所述竖动架上设置一安装轴用于与摆杆进行连接;所述布置架上设置有用于安装定刀组的横定杆,所述横定杆上安装有一弹性限位件,该弹性限位件对应竖动架设置,并由弹性限位件的弹性作用于竖动架上令竖动架向横定杆靠近,进而令动刀组弹性抵触定刀组。
5.根据权利要求4所述的苎麻收割机刀片,其特征在于:所述弹性限位件为弹簧件,其固定设置于竖动架和横定杆之间并处于拉伸状态,其通过回复力提供竖动架向横定杆靠近的力。
6.根据权利要求4所述的苎麻收割机刀片,其特征在于:所述弹性限位件为金属弹性片,所述金属弹性片的截面呈“M”形,其中部抵触于竖动架的上部,其两侧跨过竖动架的两侧并且下端固定安装于横定杆上。
7 .根据权利要求1-6中任一项所述的苎麻收割机刀片,其特征在于:该苎麻收割机还包括设置在机身上用于收集经割刀机构切割的苎麻的夹持输送机构,所述夹持输送机构的进料端位于割刀机构的上方,出料端侧机身侧边延伸至机身后部;所述夹持输送机构包括用于供苎麻输送的输送通道,输送通道的进料端转动连接有用于将苎麻拨入输送通道的拨料轮、和能够配合拨料轮将苎麻送入输送通道的挡料板,所述挡料板和拨料轮分别位于输送通道进料端的相对两侧;所述夹持输送机构进料端的下方、定刀组和动刀组的上方之间的空间中设置有一前容纳架,所述前容纳架的截面呈“U”形,其前侧面上向前方延伸形成若干用于引导苎麻向挡料板和拨料轮之间聚集的弧形板,弧形板的数量与成组的挡料板和拨料轮的数量一致且为之对应,该弧形板末端的前容纳架前侧面上形成供切割后的苎麻进行的收纳口,所述前容纳架的后侧面覆盖于布置架的前部,所述前容纳架中沿其长度方向设置第一输送带,该第一输送带由驱动电机带动进行正转或翻转,用于将从夹持输送机构掉落的苎麻向两侧开口择一的排出。
8.根据权利要求7所述的苎麻收割机刀片,其特征在于:所述机身侧边相对于输送通道的下方设置有侧容纳架,所述侧容纳架的截面呈“U”形,所述侧容纳架中沿其长度方向设置第二输送带,该第二输送带由驱动电机带动对从上方掉落的进行苎麻向后输送排出,在第二输送带的出口处设置有用于接收苎麻的储料仓。
9.根据权利要求8所述的苎麻收割机刀片,其特征在于:所述第二输送带沿其长度方向设置有均匀排列的用于支撑苎麻的突棱,若干突棱沿第二输送带的宽度方向延伸,相邻突棱之间形成用于排出杂物的凹槽,所述第二输送带向一侧倾斜设置用于使凹槽内的杂物向一侧下落,所述侧容纳架的侧边设置有与凹槽下端向对应的排料口。
10.根据权利要求9所述的苎麻收割机刀片,其特征在于:所述第二输送带的倾斜角度为5-10度。
技术领域
本发明涉及一种农业机械设备,更具体的说是涉及苎麻收割机上的刀片及其配合结构。
背景技术
苎麻素有“中国草”之称,在我国有着近5000年的种植历史,其目前在我国的种植面积和产量均占世界的90%以上。栽培苎麻主要目的是为了得到韧皮纤维,剥皮和刮青后得到的韧皮经晾晒后称为原麻,即是苎麻纺织品的原料;因其具有单纤维长,强度大,吸湿和散湿快,热传导性能好,脱胶后洁白有丝光,可以纯纺,也可和棉、丝、毛、化、纤混纺等特点,苎麻在国际市场上的需求量越来越大。
苎麻一般年收三次,传统的人工收获方式,收苎麻纤维作业占整个生产过程中用工量的五分之三以上,费工费时多,劳动强度大,技术要求高。机械化收获设备是苎麻原料、饲料生产的关键,也是影响苎麻生产向规模化产业化发展的重要因素之一。因此,要推动苎麻生产向高效发展,收获技术与收获机械的研究与创新就显得尤为重要。
申请人之前申请了申请号为201910507663.5的发明专利申请“一种苎麻收割打捆机”,其通过设置创新的夹持输送机构,可以对完成切割的苎麻进行有序输送,便于打捆机构完成打捆。其中夹持输送机构的拨料轮和挡料板会对一个区域的苎麻进行引导集中,那对应下方的苎麻茎杆也会相靠拢,这对对应区域位置上的切割刀提出了更高的要求,相比现有的切割刀,其需要具有更好的切割效果才能配合夹持输送机构完成切割和输送工作。
发明内容
针对现有技术存在的不足,本发明的目的为提供一种苎麻收割机刀片,其通过刀片结构以及传动结构的整体带动,令整体切割更加稳定高效。
为实现上述目的,本发明提供了如下技术方案:苎麻收割机刀片,该苎麻收割机包括有机身、设置在机身前方用于切割苎麻根茎的割刀机构,割刀机构包括布置架、固定设置于布置架下部的定刀组、设置于布置架上部的驱动机构、以及由驱动机构驱动进行水平活动并在上方与定刀组贴合的动刀组;定刀组和动刀组均包括水平均匀紧凑排列设置的若干切割刀片,切割刀片的横向截面呈等腰三角形,并且两腰朝前形成用于切割苎麻根茎的刃口,该两腰的夹角角度为20-30度,该两腰延伸朝前的角设置为不会插入苎麻根茎的平面,刃口设置为锯齿刃。
作为一种改进,驱动机构包括步进电机、与步进电机连接传动的左传动部、以及通过联动部与左传动部进行同步传动的右传动部,左传动部和右传动部向前连接一动架,动架上设置动刀组,步进电机在工作时带动左传动部和右传动部进行同步传动令动架进行左右往复运动。
作为一种改进,左传动部和右传动部均包括可旋转设置于布置架上的转轴、设置于转轴下部的转盘、以及转动连接于转盘圆周上的摆杆,左传动部的转轴与步进电机的电机轴进行同轴连接;联动部包括设置于两个转轴上的齿轮以及连接两个链轮进行传动的链条;摆杆相对转盘的另一端转动连接于动架上,当转盘被带动进行旋转时,驱动圆周上的摆杆进行绕圈摆动,从而带动动架进行左右往复的摆动运动。
作为一种改进,转盘与摆杆之间、摆杆与动架之间均通过关节轴承进行连接;动架包括用于安装定刀组的横动架以及安装在横动架上并向后延伸的竖动架,竖动架上设置一安装轴用于与摆杆进行连接;布置架上设置有用于安装定刀组的横定杆,横定杆上安装有一弹性限位件,该弹性限位件对应竖动架设置,并由弹性限位件的弹性作用于竖动架上令竖动架向横定杆靠近,进而令动刀组弹性抵触定刀组。
作为一种改进,弹性限位件为弹簧件,其固定设置于竖动架和横定杆之间并处于拉伸状态,其通过回复力提供竖动架向横定杆靠近的力。
作为一种改进,弹性限位件为金属弹性片,金属弹性片的截面呈“M”形,其中部抵触于竖动架的上部,其两侧跨过竖动架的两侧并且下端固定安装于横定杆上。
作为一种改进,该苎麻收割机还包括设置在机身上用于收集经割刀机构切割的苎麻的夹持输送机构,夹持输送机构的进料端位于割刀机构的上方,出料端侧机身侧边延伸至机身后部;夹持输送机构包括用于供苎麻输送的输送通道,输送通道的进料端转动连接有用于将苎麻拨入输送通道的拨料轮、和能够配合拨料轮将苎麻送入输送通道的挡料板,挡料板和拨料轮分别位于输送通道进料端的相对两侧;夹持输送机构进料端的下方、定刀组和动刀组的上方之间的空间中设置有一前容纳架,前容纳架的截面呈“U”形,其前侧面上向前方延伸形成若干用于引导苎麻向挡料板和拨料轮之间聚集的弧形板,弧形板的数量与成组的挡料板和拨料轮的数量一致且为之对应,该弧形板末端的前容纳架前侧面上形成供切割后的苎麻进行的收纳口,前容纳架的后侧面覆盖于布置架的前部,前容纳架中沿其长度方向设置第一输送带,该第一输送带由驱动电机带动进行正转或翻转,用于将从夹持输送机构掉落的苎麻向两侧开口择一的排出。
作为一种改进,机身侧边相对于输送通道的下方设置有侧容纳架,侧容纳架的截面呈“U”形,侧容纳架中沿其长度方向设置第二输送带,该第二输送带由驱动电机带动对从上方掉落的进行苎麻向后输送排出,在第二输送带的出口处设置有用于接收苎麻的储料仓。
作为一种改进,第二输送带沿其长度方向设置有均匀排列的用于支撑苎麻的突棱,若干突棱沿第二输送带的宽度方向延伸,相邻突棱之间形成用于排出杂物的凹槽,第二输送带向一侧倾斜设置用于使凹槽内的杂物向一侧下落,侧容纳架的侧边设置有与凹槽下端向对应的排料口。
作为一种改进,第二输送带的倾斜角度为5-10度。
本发明的有益效果,不同于传统切割盘即圆刀片的切割方式,采用上下设置的动刀组和定刀组进行水平交叉剪切,可以在上方夹持输送机构进行苎麻引导集中时,到达切割位置的苎麻根茎可以在下方进行稳定的卡位剪切,根茎不会因原来圆刀片旋转的作用力而偏移,有利于保证上方夹持输送机构的正常引导输送;具体设置的刀片形状与角度,有利于收割机在行进过程中,配合上下刀片的小角度剪切,并且依靠锯齿刃与机器行进的整体作用力,轻松平整的切断根茎;刀片前部的平面克服了现有技术中尖的前部插入根茎带动根茎活动所产生的根茎撕扯,保证根茎如果抵触了平面能够在平面离开后进入刃口完成切割,保证切割质量,避免一些苎麻被撕扯跑偏,影响上方夹持输送机构的正常引导输送。
附图说明
图1为本发明的苎麻收割机的立体结构示意图。
图2为本发明的割刀机构的立体结构示意图。
图3为图2中M处的放大图。
图4为本发明的割刀机构的侧面结构示意图。
图5为图4中A-A处的截面图。
图6为本发明的苎麻收割机另一实施例的侧面结构示意图。
图7为本发明的夹持输送机构、前容纳架、割刀机构处的仰视结构示意图。
图8为本发明的夹持输送机构、前容纳架、割刀机构处的正面结构示意图。
图9为本发明的侧容纳架、前容纳架的侧面结构示意图。
图10为本发明的侧容纳架处的截面结构示意图。
具体实施方式
以下结合附图对本发明的具体实施例做详细说明。
如图1-10所示,为本发明苎麻收割机刀片的具体实施例,该苎麻收割机包括有机身1、设置在机身1前方用于切割苎麻根茎的割刀机构3,割刀机构3包括布置架31、固定设置于布置架31下部的定刀组32、设置于布置架31上部的驱动机构33、以及由驱动机构33驱动进行水平活动并在上方与定刀组32贴合的动刀组34;定刀组32和动刀组34均包括水平均匀紧凑排列设置的若干切割刀片0,切割刀片0的横向截面呈等腰三角形,并且两腰朝前形成用于切割苎麻根茎的刃口01,该两腰的夹角角度为20-30度,该两腰延伸朝前的角设置为不会插入苎麻根茎的平面02,刃口01设置为锯齿刃。
本发明在实施时,整体苎麻收割机可直接参照申请人之前申请的发明专利,其申请号为201910507663.5,名称为一种苎麻收割打捆机;在应用夹持输送机构5的基础上,为了提高夹持输送机构5的进料端对苎麻进料引导的稳定性,重新设计了割刀机构3的切刀组,来提高切割过程中的相对稳定性,令上方夹持输送机构5的挡料板513和拨料轮512更稳定有序的引导输送苎麻至输送通道511。首先切刀组采用了定刀组32和动刀组34的方式,通过上方动刀组34的水平来回活动配合定刀组32对苎麻根茎进行剪切,原来圆刀片的切割方式在切断苎麻根茎或者是切割过程中,受到根茎圆刀片一定的旋转力会带偏切断的苎麻根茎,该力会作用到上方的夹持输送机构5处,从而可能影响苎麻被夹持输送机构5引导集中或者夹持时的有序性,可能会出现零星苎麻未被正常引导至夹持,从而出现掉落的情况,影响苎麻的收集,掉落的苎麻还有可能影响后方收割机结构部件的正常运行;而本发明中的定刀组32和动刀组34形成了上下两排切割刀片0,下方定刀组32的切割刀片0之间形成了不会偏移的切割空间,苎麻在进入其中后位置稳定不会被带偏,而通过上方动刀组34的切割刀片0的水平移动,上下配合完成了对苎麻根茎的剪切,结构稳定,切割后的苎麻不会偏移,有利于上方夹持输送机构5的正常引导输送。进一步的将切割刀片0设为前部夹角为20-30度的等腰三角形,相邻切割刀片0之间的空间也为20-30度的等腰三角形,配合设置为锯齿刃的刃口01,在收割机行进的作用力以及上下切割刀片0的水平切割力下,保证苎麻根茎可以被快速剪切“锯开”,尽量减少了切割时对上方夹持输送机构5工作的影响;并且将切割刀片0前部设为平面02,克服了现有技术中尖的前部插入根茎带动根茎活动所产生的根茎撕扯,保证根茎如果抵触了平面02能够在平面02离开后进入刃口01完成切割,保证切割质量,避免一些苎麻被撕扯跑偏,影响上方夹持输送机构5的正常引导输送;本发明整体上提高了切割苎麻根茎的效果和稳定性,有利于配合夹持输送机构5时的苎麻稳定。
作为一种改进的具体实施方式,驱动机构33包括步进电机331、与步进电机331连接传动的左传动部332、以及通过联动部333与左传动部332进行同步传动的右传动部334,左传动部332和右传动部334向前连接一动架335,动架335上设置动刀组34,步进电机331在工作时带动左传动部332和右传动部334进行同步传动令动架335进行左右往复运动。
如图1、2所示,以一个步进电机331提供动力,然后向两侧分别传动来驱动左传动部332和右传动部334,再向前引出一动架335来安装动刀组34,在动刀组34整体较宽时提供了良好的左右稳定带动的效果。
作为一种改进的具体实施方式,左传动部332和右传动部334均包括可旋转设置于布置架31上的转轴3321、设置于转轴3321下部的转盘3322、以及转动连接于转盘3322圆周上的摆杆3323,左传动部332的转轴3321与步进电机331的电机轴进行同轴连接;联动部333包括设置于两个转轴3321上的齿轮3331以及连接两个链轮3331进行传动的链条;摆杆3323 相对转盘3322的另一端转动连接于动架335上,当转盘3322被带动进行旋转时,驱动圆周上的摆杆3323进行绕圈摆动,从而带动动架335进行左右往复的摆动运动。
如图1、2、3、4所示,摆杆3323在转盘3322圆周上的设置方式,令转轴3321旋转时可以带动摆杆3323进行水平活动的同时,还带有前后一定距离的摆动,其作用在动架335上,就令动刀组34在水平往复移动的同时由前后的位置移动,配合锯齿刃的刃口01可以在剪切苎麻根茎时提供更好的锯齿切割效果,提高切割质量和效率。左传动部332和右传动部334 可通过现有技术中的链轮3331配合链条实现传动,能良好的保证传动的一致性。在具体实施时,如图2、3的布置方式,摆杆3323连接在转盘3322上部,活动会与转轴3321干涉,可以通过步进电机331带动转盘3322进行180度的旋转,然后进行正转和反转的往复实现动架335 的水平往复运动。或者是可以将摆杆3323连接在转盘3322下部(图中未示出),摆杆3323不被阻挡可以配合转盘3322进行360度旋转,此时由步进电机331带动进行持续运动。
作为一种改进的具体实施方式,转盘3322与摆杆3323之间、摆杆3323与动架335之间均通过关节轴承进行连接;动架335包括用于安装定刀组32的横动架3351以及安装在横动架3351上并向后延伸的竖动架3352,竖动架3352上设置一安装轴3353用于与摆杆3323进行连接;布置架31上设置有用于安装定刀组32的横定杆311,横定杆311上安装有一弹性限位件312,该弹性限位件312对应竖动架3352设置,并由弹性限位件312的弹性作用于竖动架3352上令竖动架3352向横定杆311靠近,进而令动刀组34弹性抵触定刀组32。
如图2、3、4所示,因收割机在行进时难免会出现地面不平颠簸的情况,传动结构间如果采用自由度较低的连接方式可能会影响到使用寿命;故该实施方式下将转盘3322与摆杆3323之间、摆杆3323与动架335之间均通过关节轴承进行连接,令结构上如果出现颠簸时,摆杆3323两端依靠关节轴承可以进行一定的摆动;而在具有一定自由度的结构下,横定杆311和竖动架3352之间通过弹性限位件312进行靠近,而令动刀组34和定刀组32进行弹性抵触,两者之间不会因为颠簸而分离影响切割,并且相对的弹性抵触也保证了结构上配合稳定,不会因长期使用而出现松动。
作为一种改进的具体实施方式,弹性限位件312为弹簧件,其固定设置于竖动架3352和横定杆311之间并处于拉伸状态,其通过回复力提供竖动架3352向横定杆311靠近的力。
该种实施方式在附图中未示出,其可通过固定结构将弹簧件的两端固定在竖动架3352和横定杆311之间,依靠其拉力令竖动架3352向横定杆311靠近,从而保持动刀组34和定刀组32的弹性抵触;由于竖动架3352在进行水平运动,且有一定的摆动,弹性件在设置时随着竖动架3352的运动会受到径向的扭曲力,可能不利于长期的使用,故可以优选为后一种实施方式。
作为一种改进的具体实施方式,弹性限位件312为金属弹性片,金属弹性片的截面呈“M”形,其中部抵触于竖动架3352的上部,其两侧跨过竖动架3352的两侧并且下端固定安装于横定杆311上。
如图4、5所示,该种实施方式为优选的方式,其通过一“M”形的金属弹性片在上部抵触竖动架3352,将竖动架3352抵向横定杆311,在竖动架3352水平移动时,由金属弹性片中部的面与竖动架3352的上表面相抵触,两侧固定安装在横定杆311上,结构稳定,可以适应长期使用;并且为了可以由更长的使用寿命,可以在配合处加上润滑剂或者加工成尽量光滑的表面来减少摩擦。
当然,无论是弹簧件或者是“M”形的金属弹性片,均选择具有足够强度的材料制造,能够适应竖动架3352和横定杆311之间的抵触配合。
作为一种改进的具体实施方式,该苎麻收割机还包括设置在机身1上用于收集经割刀机构3切割的苎麻的夹持输送机构5,夹持输送机构5的进料端位于割刀机构3的上方,出料端侧机身1侧边延伸至机身1后部;夹持输送机构5包括用于供苎麻输送的输送通道511,输送通道511的进料端转动连接有用于将苎麻拨入输送通道511的拨料轮512、和能够配合拨料轮512将苎麻送入输送通道511的挡料板513,挡料板513和拨料轮512分别位于输送通道511进料端的相对两侧;夹持输送机构5进料端的下方、定刀组32和动刀组34的上方之间的空间中设置有一前容纳架6,前容纳架6的截面呈“U”形,其前侧面上向前方延伸形成若干用于引导苎麻向挡料板513和拨料轮512之间聚集的弧形板61,弧形板61的数量与成组的挡料板513和拨料轮512的数量一致且为之对应,该弧形板61末端的前容纳架6前侧面上形成供切割后的苎麻进行的收纳口62,前容纳架6的后侧面覆盖于布置架31的前部,前容纳架6中沿其长度方向设置第一输送带63,该第一输送带63由驱动电机带动进行正转或翻转,用于将从夹持输送机构5掉落的苎麻向两侧开口择一的排出。
如图6、7、8所示,在夹持输送机构5输送的过程中,难免会有零星的苎麻未能被良好的夹持而出现掉落,其如果很混乱的掉落将提高后期工作人员收集的繁琐程度,甚至该掉落的苎麻有可能落向后方的割刀机构3或者是动力行走机构2,若割刀机构3或者是动力行走机构2中的传动零部件如果受到苎麻根茎长期的影响,可能会造成卡顿甚至是影响使用寿命而出现损坏。
在此基础上,在前部进一步设置前容纳架6,其安装在机身1上,首先依靠弧形板61匹配夹持输送机构5进料端的挡料板513和拨料轮512,对苎麻进行一定的引导,即苎麻整体倚靠在弧形板61上向挡料板513和拨料轮512之间带动,弧形板61也为苎麻提供了支撑力,等于是相对的扶住了苎麻,下方切刀组可以更稳定的进行切割,切割完后的苎麻也可以顺着弧形板61被带入输送通道511;苎麻通过弧形板61末端的收纳口62进入到前容纳架6中,等于是在前方夹持输送机构5的下方加了一个U形的罩子,若苎麻出现掉落,其会掉落在第一输送带63上,由工作人员选择第一输送带63的运行方向,将掉落的苎麻向空旷的一侧排出(另一侧的苎麻尚未收割) ,便于工作人员后期的收集,没有掉落的苎麻沿着输送通道511 向后输送离开前容纳架6。前容纳架6的结构实现了前方掉落苎麻的有序排出,便于收集,并且阻止了掉落苎麻散乱的可能性,可以较好的保护到后方割刀机构3或者是动力行走机构2。
作为一种改进的具体实施方式,机身1侧边相对于输送通道511的下方设置有侧容纳架7,侧容纳架7的截面呈“U”形,侧容纳架7中沿其长度方向设置第二输送带71,该第二输送带71由驱动电机带动对从上方掉落的进行苎麻向后输送排出,在第二输送带71的出口处设置有用于接收苎麻的储料仓8。
如图6、9、10所示,在前容纳架6的基础上,进一步在机身1上安装侧容纳架7来对侧方夹持输送机构5的下方加了一个U形的罩子,若苎麻出现掉落,其会掉落在第二输送带71 上,在第二输送带71后方的出口处设置储料仓8,因结构上允许,相比于前容纳架6可以直接依靠储料仓8完成对掉落苎麻的收集,更加的方便;夹持输送机构5的出料端设置有对苎麻进行打捆的打捆机构4,储料仓8在设置时可以避让开位于上方的打捆机构4,实现结构上的紧凑。侧容纳架7的结构实现了侧方掉落苎麻的有序输送收集,阻止了掉落苎麻散乱的可能性,可以较好的保护到侧方的动力行走机构2。
作为一种改进的具体实施方式,第二输送带71沿其长度方向设置有均匀排列的用于支撑苎麻的突棱72,若干突棱72沿第二输送带71的宽度方向延伸,相邻突棱72之间形成用于排出杂物的凹槽73,第二输送带71向一侧倾斜设置用于使凹槽73内的杂物向一侧下落,侧容纳架7的侧边设置有与凹槽73下端向对应的排料口74。
如图9、10所示,为进一步提高储料仓8处苎麻收集的有序性,剔除掉一些微小枝叶杂物,设置若干突棱72来支撑成段的苎麻,在收割机行进过程中存在的颠簸会把小型的枝叶杂物抖落至凹槽73之中,在第二输送带71倾斜的底端设置细长的排料口74,其长度低于突棱72的最低位置,可以让杂物向一侧落出,杂物不会到达储料仓8。
作为一种改进的具体实施方式,第二输送带71的倾斜角度为5-10度。在具体实施时,第二输送带71的倾斜角度不用设置的过大,可选择5-10度,依靠收割机的颠簸会把杂物向低处抖落;而在突棱72上可以进一步设置防滑纹路来提高对苎麻输送的摩擦力,令苎麻输送更有序,苎麻不易堆向低处。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。

图1
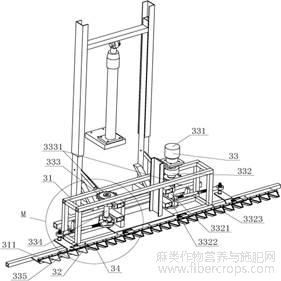
图2
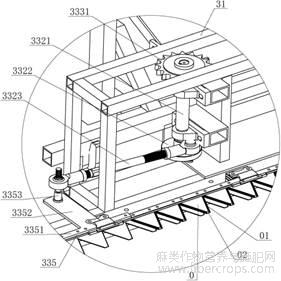
图3

图4

图5
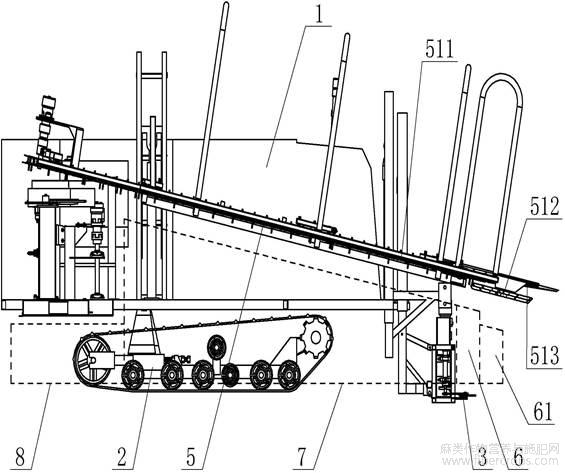
图6
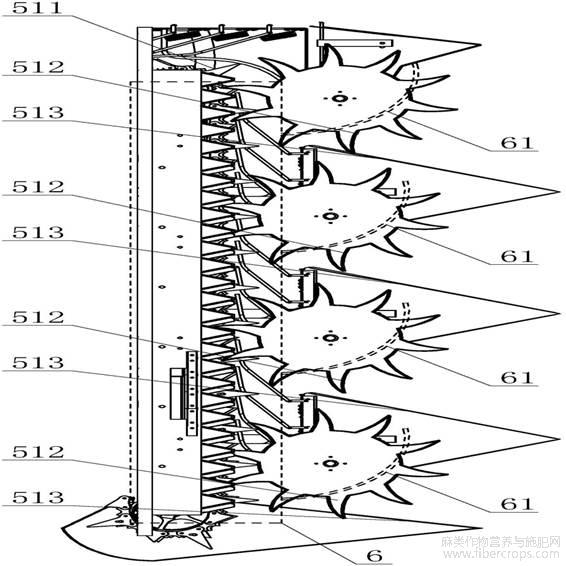
图7
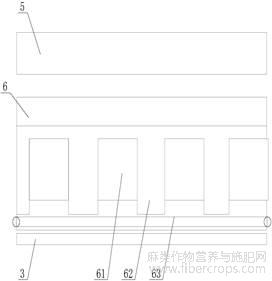
图8
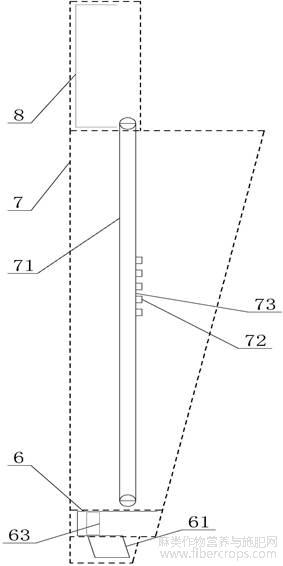
图9
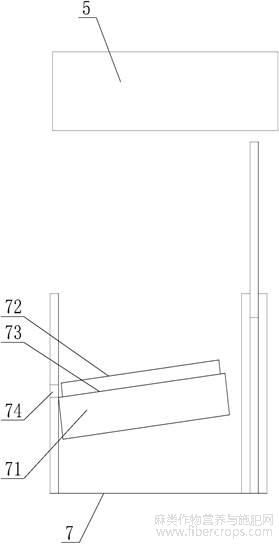
图10
摘自国家发明专利,发明人:张彬,黄继承,李显旺,田昆鹏,沈成,刘浩鲁,申请号202010221618.6,申请日2020.03.25
