摘 要:本发明公开了一种手扶式苎麻割捆机,其链条式输送机构包括从上至下依次布置的上输送链、中输送链和下输送链,分禾机构包括上三角板以及设置于其后部的上拨杆齿轮、中三角板以及设置于其后部的中拨杆齿轮、下三角板以及设置于其后部的下拨杆齿轮,上拨杆齿轮与上输送链相对,中拨杆齿轮与中输送链相对,下拨杆齿轮与下输送链相对,上三角板、中三角板和下三角板的前部通过竖杆连接;其打捆机构包括在高度方向上分隔设置的两组打结组件,上部打结组件设置于上输送链输出端的上方,下部打结组件设置于上输送链和中输送链之间的输出端。本发明以上中下三个位置增加对苎麻茎杆的接触限位效果,保证苎麻在输送过程中不倾斜,保证打捆质量。
权力要求书
1.一种手扶式苎麻割捆机,包括机架(0)、由上至下依次设置于机架(0)前部的链条式输送机构(1)和切割机构(2),所述链条式输送机构(1)前方设置用于对苎麻进行分散并向后输送的分禾机构(3),所述链条式输送机构(1)的输出端设置有打捆机构(4);所述分禾机构(3)沿着链条式输送机构(1)的输送方向进行布置若干组,若干组分禾机构(3)之间间隔设置形成供苎麻进入的进入通道(01),分禾机构(3)和链条式输送机构(1)之间间隔形成苎麻输送的输送通道(02);其特征在于:所述链条式输送机构(1)包括从上至下依次布置的上输送链(11)、中输送链(12)和下输送链(13),所述分禾机构(3)包括上三角板(31)以及设置于其后部的上拨杆齿轮(34)、中三角板(32)以及设置于其后部的中拨杆齿轮(35)、下三角板(33)以及设置于其后部的下拨杆齿轮(36),所述上拨杆齿轮(34)与上输送链(11)相对,所述中拨杆齿轮(35)与中输送链(12)相对,所述下拨杆齿轮(36)与下输送链(13)相对,所述上三角板(31)、中三角板(32)和下三角板(33)的前部通过一竖杆(30)连接,并通过竖杆(30)分隔苎麻;所述打捆机构(4)包括在高度方向上分隔设置的两组打结组件(42),上部打结组件(42)设置于上输送链(11)输出端的上方,下部打结组件(42)设置于上输送链(11)和中输送链(12)之间的输出端。
2.根据权利要求1所述的一种手扶式苎麻割捆机,其特征在于:所述上输送链(11)和中输送链(12)长度相同且完全对应前方的进入通道(01),所述下输送链(13)短于上输送链(11)和中输送链(12),下输送链(13)的输出端与上输送链(11)和中输送链(12)对齐,输入端向切割机构(2)延伸,令下输送链(13)和切割机构(2)在投影位置上产生重叠。
3.根据权利要求2所述的一种手扶式苎麻割捆机,其特征在于:所述下输送链(13)的长度设置为覆盖1/2?2/3的输送通道(02)。
4.根据权利要求2所述的一种手扶式苎麻割捆机,其特征在于:所述切割机构(2)和打捆机构(4)之间留有间隙(6),所述间隙(6)处由下输送链(13)所补充。
5.根据权利要求1?4中任一项所述的一种手扶式苎麻割捆机,其特征在于:所述上输送链(11)、中输送链(12)和下输送链(13)上均匀设置有送料齿(111),所述上输送链(11)的送料齿(111)远端进一步延伸设置加长弯曲拨齿(112),所述加长弯曲拨齿(112)朝向输出方向延伸弯曲。
6.根据权利要求1?4中任一项所述的一种手扶式苎麻割捆机,其特征在于:所述中三角板(32)和下三角板(33)的前端合并形成下分隔角,所述上三角板(31)的前端形成上分隔角,所述上分隔角和下分隔角处套设锐角加强块(301),所述竖杆(30)的上下两端分别连接于锐角加强块(301)处。
7.根据权利要求1?4中任一项所述的一种手扶式苎麻割捆机,其特征在于:所述打捆机构(4)还包括传动箱(40)、搂麻组件(41)、开合挡板(43)和拨捆组件(44),两组打结组件(42)之间通过连杆进行结构联动,所述打结组件(42)包括打结器本体(421)和捆针(422),所述打结器本体(421)和捆针(422)分别在左右两侧设置,并在中间形成供苎麻进入收集的打捆空间(45),所述打捆空间(45)的两侧形成入口(451)和出口(452),所述开合挡板(43)与捆针(422)同侧设置并通过扭矩传感器(431)布置阻挡于出口(452)处,所述扭矩传感器(431)用于检测开合挡板(43)处所承受的压力,当压力到达设定值时反馈信号令打结组件(42)工作完成苎麻打捆,并令开合挡板(43)旋转开放出口(452),所述搂麻组件(41)与捆针(422)同侧设置并位于入口(451)侧边,其在入口(451)侧边做周期性往复工作对苎麻进行向打捆空间(45)的搂拨;所述拨捆组件(44)与打结器本体(421)同侧设置并位于出口(452)侧边,其在出口(452)侧边做周期性往复工作将完成打捆的苎麻拨出出口(452);所述传动箱(40)内的传动机构对外连接驱动机构,并由传动机构连接至搂麻组件(41)、打结组件(42)、开合挡板(43)和拨捆组件(44)进行带动。
8.根据权利要求7所述的一种手扶式苎麻割捆机,其特征在于:所述传动箱(40)的传动机构包括输入轴(401)、搂麻传动轴(402)、打结传动轴(403)以及开合传动轴(404),所述输入轴(401)、搂麻传动轴(402)、打结传动轴(403)上分别设置第一齿轮(4011)、第二齿轮(4012)和第三齿轮(4013)进行依次啮合传动,其中输入轴(401)和第一齿轮(4011)、第二齿轮(4012)和搂麻传动轴(402)进行固定设置,所述第三齿轮(4013)可旋转的套设于打结传动轴(403)上,所述打结传动轴(403)和第三齿轮(4013)上还设置有离合机构(405),所述离合机构(405)合拢时令打结传动轴(403)和第三齿轮(4013)进行同步旋转,令对外连接动力源的输入轴(401)同步带动搂麻传动轴(402)和打结传动轴(403)进行旋转,所述搂麻传动轴(402)和打结传动轴(403)分别连接搂麻组件(41)和打结组件(42)进行带动,所述开合传动轴(404)通过设置独立的动力源,开合传动轴(404)连接开合挡板(43)进行联动。
9.根据权利要求8所述的一种手扶式苎麻割捆机,其特征在于:所述离合机构(405)包括第一推拉式电磁铁(4051)、推块(4052)、下卡盘(4053)和上卡盘(4054),所述上卡盘(4054)和第三齿轮(4013)一体设置,所述下卡盘(4053)与推块(4052)连接,所述推块(4052)由第一推拉式电磁铁(4051)驱动进行往复运动,控制上卡盘(4054)和下卡盘(4053)合拢联动或相互分离;所述下卡盘(4053)包括下部外圆周设置的一圈凹台(40531),所述推块(4052)具有一嵌入凹台(40531)的配合块(40521),所述下卡盘(4053)的旋转不与推块(4052)发生联动,所述推块(4052)的往复运动通过嵌入凹台(40531)的配合块(40521)作用于下卡盘(4053)进行联动。
10.根据权利要求7所述的一种手扶式苎麻割捆机,其特征在于:所述搂麻组件(41)包括上中下三组搂麻臂(411),上方搂麻臂(411)与上方打结组件(42)对应设置,中部搂麻臂(411)与下方打结组件(42)对应设置,下方搂麻臂(411)位于下方打结组件(42)的下部;所述拨捆组件(44)包括三组拨捆臂(441),上方拨捆臂(441)设置于下方打结组件(42)的上方,中部和下方拨捆臂(441)间隔设置于下方打结组件(42)的下方。
技术领域
本发明涉及一种农业机械设备,更具体的说是一种手扶式苎麻割捆机。
背景技术
苎麻收割捆扎机的切割输送机构设置在前部,切割输送机构由上至下依次设置链条式输送机构和切割机构,链条式输送机构和切割机构的前方设置用于引导苎麻的分禾机构,苎麻被引导至切割机构处从根部切断,然后被切断的苎麻被链条式输送机构输送向侧边,由出口端设置的打捆机构进行打捆然后输出。对于小型的手扶式苎麻割捆机,其链条式输送机构上部不设置扶禾轮,因此需要重新设计输送部分的机械结构,使茎秆在输送过程中保持直立不倾斜,从而使之后打捆工序顺利进行。
发明内容
针对现有技术存在的不足,本发明的目的为提供一种手扶式苎麻割捆机,其采用三输送链配合延伸的分禾机构结构,形成更为稳定的通道去输送苎麻,保证苎麻在输送过程中不会倾斜,可被良好输送至打捆机构并进行上下两位置的打捆,保证苎麻打捆的质量。
为实现上述目的,本发明提供了如下技术方案:一种手扶式苎麻割捆机,包括机架、由上至下依次设置于机架前部的链条式输送机构和切割机构,链条式输送机构前方设置用于对苎麻进行分散并向后输送的分禾机构,链条式输送机构的输出端设置有打捆机构;分禾机构沿着链条式输送机构的输送方向进行布置若干组,若干组分禾机构之间间隔设置形成供苎麻进入的进入通道,分禾机构和链条式输送机构之间间隔形成苎麻输送的输送通道;链条式输送机构包括从上至下依次布置的上输送链、中输送链和下输送链,分禾机构包括上三角板以及设置于其后部的上拨杆齿轮、中三角板以及设置于其后部的中拨杆齿轮、下三角板以及设置于其后部的下拨杆齿轮,上拨杆齿轮与上输送链相对,中拨杆齿轮与中输送链相对,下拨杆齿轮与下输送链相对,上三角板、中三角板和下三角板的前部通过一竖杆连接,并通过竖杆分隔苎麻;打捆机构包括在高度方向上分隔设置的两组打结组件,上部打结组件设置于上输送链输出端的上方,下部打结组件设置于上输送链和中输送链之间的输出端。
作为一种改进,上输送链和中输送链长度相同且完全对应前方的进入通道,下输送链短于上输送链和中输送链,下输送链的输出端与上输送链和中输送链对齐,输入端向切割机构延伸,令下输送链和切割机构在投影位置上产生重叠。
作为一种改进,下输送链的长度设置为覆盖1/2?2/3的输送通道。
作为一种改进,切割机构和打捆机构之间留有间隙,间隙处由下输送链所补充。
作为一种改进,上输送链、中输送链和下输送链上均匀设置有送料齿,上输送链的送料齿远端进一步延伸设置加长弯曲拨齿,加长弯曲拨齿朝向输出方向延伸弯曲。
作为一种改进,中三角板和下三角板的前端合并形成下分隔角,上三角板的前端形成上分隔角,上分隔角和下分隔角处套设锐角加强块,竖杆的上下两端分别连接于锐角
作为一种改进,打捆机构还包括传动箱、搂麻组件、开合挡板和拨捆组件,两组打结组件之间通过连杆进行结构联动,打结组件包括打结器本体和捆针,打结器本体和捆针别在左右两侧设置,并在中间形成供苎麻进入收集的打捆空间,打捆空间的两侧形成入口和出口,开合挡板与捆针同侧设置并通过扭矩传感器布置阻挡于出口处,扭矩传感器用于检测开合挡板处所承受的压力,当压力到达设定值时反馈信号令打结组件工作完成苎麻打捆,并令开合挡板旋转开放出口,搂麻组件与捆针同侧设置并位于入口侧边,其在入口侧边做周期性往复工作对苎麻进行向打捆空间的搂拨;拨捆组件与打结器本体同侧设置并位于出口侧边,其在出口侧边做周期性往复工作将完成打捆的苎麻拨出出口;传动箱内的传动机构对外连接驱动机构,并由传动机构连接至搂麻组件、打结组件、开合挡板和拨捆组件进行带动。
作为一种改进,传动箱的传动机构包括输入轴、搂麻传动轴、打结传动轴以及开合传动轴,输入轴、搂麻传动轴、打结传动轴上分别设置第一齿轮、第二齿轮和第三齿轮进行依次啮合传动,其中输入轴和第一齿轮、第二齿轮和搂麻传动轴进行固定设置,第三齿轮可旋转的套设于打结传动轴上,打结传动轴和第三齿轮上还设置有离合机构,离合机构合拢时令打结传动轴和第三齿轮进行同步旋转,令对外连接动力源的输入轴同步带动搂麻传动轴和打结传动轴进行旋转,搂麻传动轴和打结传动轴分别连接搂麻组件和打结组件进行带动,开合传动轴通过设置独立的动力源,开合传动轴连接开合挡板进行联动。
作为一种改进,离合机构包括第一推拉式电磁铁、推块、下卡盘和上卡盘,上卡盘和第三齿轮一体设置,下卡盘与推块连接,推块由第一推拉式电磁铁驱动进行往复运动,控制上卡盘和下卡盘合拢联动或相互分离;下卡盘包括下部外圆周设置的一圈凹台,推块具有一嵌入凹台的配合块,下卡盘的旋转不与推块发生联动,推块的往复运动通过嵌入凹台的配合块作用于下卡盘进行联动。
作为一种改进,搂麻组件包括上中下三组搂麻臂,上方搂麻臂与上方打结组件对应设置,中部搂麻臂与下方打结组件对应设置,下方搂麻臂位于下方打结组件的下部;拨捆组件包括三组拨捆臂,上方拨捆臂设置于下方打结组件的上方,中部和下方拨捆臂间隔设置于下方打结组件的下方。
本发明的有益效果,在小型手扶式苎麻割捆机没有设置扶禾轮的情况下,通过设置上中下三条输送链的方式,以及分禾机构在上中下三个位置对应输送链设置三角板和拨杆齿轮,增加对苎麻茎杆上中下三个位置的接触限位效果,令茎杆被更好的受力向前输送,保证苎麻在输送过程中不会倾斜,可被良好输送至打捆机构,并通过在打捆机构设置上下两位置的打结组件,对细长茎杆的苎麻更好的完成打捆,保证苎麻打捆的质量。
具体实施方式
以下结合附图对本发明的具体实施例做详细说明。
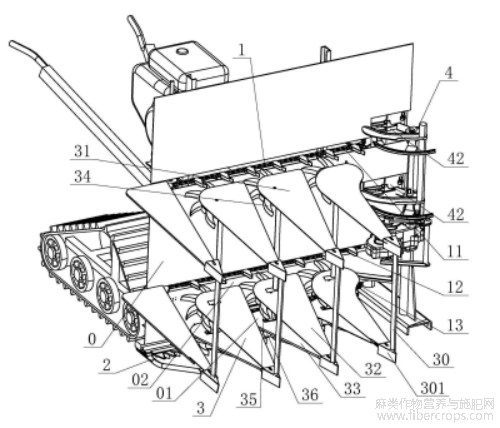
如图1?6所示,为本发明手扶式苎麻割捆机的具体实施例,其包括机架0、由上至下依次设置于机架0前部的链条式输送机构1和切割机构2,链条式输送机构1前方设置用于对麻进行分散并向后输送的分禾机构3,链条式输送机构1的输出端设置有打捆机构4;分禾机构3沿着链条式输送机构1的输送方向进行布置若干组,若干组分禾机构3之间间隔设置形成供苎麻进入的进入通道01,分禾机构3和链条式输送机构1之间间隔形成苎麻输送的输送通道02;链条式输送机构1包括从上至下依次布置的上输送链11、中输送链12和下输送链13,分禾机构3包括上三角板31以及设置于其后部的上拨杆齿轮34、中三角板32以及设置于其后部的中拨杆齿轮35、下三角板33以及设置于其后部的下拨杆齿轮36,上拨杆齿轮34与上输送链11相对,中拨杆齿轮35与中输送链12相对,下拨杆齿轮36与下输送链13相对,上三角板31、中三角板32和下三角板33的前部通过一竖杆30连接,并通过竖杆30分隔苎麻;打捆机构4包括在高度方向上分隔设置的两组打结组件42,上部打结组件42设置于上输送链11输出端的上方,下部打结组件42设置于上输送链11和中输送链12之间的输出端。
本发明在使用时,其应用于小型的手扶式苎麻割捆机,链条式输送机构1的上部不设置扶禾轮,为保证其对苎麻输送的直立不倾斜,改进了链条式输送机构1和分禾机构3。苎麻在进入分禾机构3时,增加了高度的分禾机构3就对茎杆较为细长的苎麻起到了直立引导的作用,前方竖杆30配合上中下各位置的三角板,苎麻被分流进入各自的进入通道01,到达切割机构2后苎麻下部被切断,此时苎麻也到达了输送通道02,苎麻茎杆的上中下三个位置分别由上输送链11和上拨杆齿轮34(配合上三角板31后端)、中输送链12和和中拨杆齿轮35(配合中三角板32后端)、下输送链13和下拨杆齿轮36(配合下三角板33后端)进行良好的接触限位,从而令苎麻在输送过程中更好的保持直立状态不倾斜,苎麻在输送过程中受力稳定,保证苎麻能够有序的到达打捆机构4。另一方面,打捆机构4在高度方向上分隔设置两组结组件42,上方打结组件42的位置对应上输送链11设置,下部打结组件42的位置设置于上输送链11和中输送链12之间的高度位置,下方打结组件42大致对苎麻茎秆中部进行打结,上方打结组件42对苎麻茎秆上部进行打结,因茎秆上端更加的细小散乱,完成打结后令苎麻整体更加的稳定整齐,不易折断;两位置的打捆令苎麻成捆效果好,保证苎麻打捆的质量。
作为一种改进的具体实施方式,上输送链11和中输送链12长度相同且完全对应前方的进入通道01,下输送链13短于上输送链11和中输送链12,下输送链13的输出端与上输送链11和中输送链12对齐,输入端向切割机构2延伸,令下输送链13和切割机构2在投影位置上产生重叠。
如图1、2、3所示,上输送链11和中输送链12作为基础输送结构,在整个长度方向布置,进行基础的苎麻稳定和输送工作;下输送链13本身更靠近切割机构2,其在输出端与上输送链11和中输送链12对齐,提供对苎麻下部的良好限位并输送,苎麻在将要进入打捆机构4时下部不易偏移倾斜;而其不完全向切割机构2延伸至最远端,而是与切割机构2在投影位置上产生重叠,即是保证在苎麻茎杆被切断后,在输送的后期开始进行苎麻的接触输送,不影响大部分位置切割机构2的切割作业以及苎麻的分散输送。
作为一种改进的具体实施方式,下输送链13的长度设置为覆盖1/2?2/3的输送通道02。
如图3所示,越远离打捆机构4的位置,其苎麻进入通道的数量及密度不会太高,当输送越靠近打捆机构4时,苎麻间的混乱挤压更易出现拥堵问题以及进一步的茎杆挤压倾斜问题,故将下输送链13设置为覆盖1/2?2/3的输送通道02,一方面控制机构增设的成本,一方面即可解决输送后期苎麻到达打捆机构4时堵塞以及倾斜的问题。
作为一种改进的具体实施方式,切割机构2和打捆机构4之间留有间隙6,间隙6处由下输送链13所补充。
如图3所示,因结构上的布置需要,切割机构2不能完全覆盖到打捆机构4的输出端,这就留出了间隙6,该间隙6也便于苎麻可以在被切割后预先在输送通道02完成了排列并输送,然后有序的到达打捆机构4;而空隙6处的苎麻下部可以被下输送链13所补充并进行良好的接触限位输送。
作为一种改进的具体实施方式,上输送链11、中输送链12和下输送链13上均匀设置有送料齿111,上输送链11的送料齿111远端进一步延伸设置加长弯曲拨齿112,加长弯曲拨齿112朝向输出方向延伸弯曲。
如图2所示,送料齿111本身为输送链的常规设计,在本发明应用的小型手扶式苎麻割捆机没有上部的扶禾轮,最上部上输送链11的送料齿111上设计加长且弯曲的指状结构,即加长弯曲拨齿112,此设计的目的是由于茎秆细长,防止茎秆输送过程中歪倒,提高了输送的可靠性。
作为一种改进的具体实施方式,中三角板32和下三角板33的前端合并形成下分隔角,上三角板31的前端形成上分隔角,上分隔角和下分隔角处套设锐角加强块301,竖杆30的上下两端分别连接于锐角加强块301处。
如图1、2、3所示,苎麻下部茎杆相比上部更为坚硬,由中三角板32和下三角板33的前端合并形成下分隔角并设置锐角加强块301,可保证结构的强度,对苎麻茎杆进行良好的分隔引导,上部上三角板31的上分隔角也设置锐角加强块301提高强度,上下锐角加强块301连接竖杆30,形成良好的前部分流引导结构,可作用于细长的苎麻茎杆。
作为一种改进的具体实施方式,打捆机构4还包括传动箱40、搂麻组件41、开合挡板43和拨捆组件44,两组打结组件42之间通过连杆进行结构联动,打结组件42包括打结器本体421和捆针422,打结器本体421和捆针422分别在左右两侧设置,并在中间形成供苎麻进入收集的打捆空间45,打捆空间45的两侧形成入口451和出口452,开合挡板43与捆针422同侧设置并通过扭矩传感器431布置阻挡于出口452处,扭矩传感器431用于检测开合挡板43处所承受的压力,当压力到达设定值时反馈信号令打结组件42工作完成苎麻打捆,并令开合挡板43旋转开放出口452,搂麻组件41与捆针422同侧设置并位于入口451侧边,其在入口451侧边做周期性往复工作对苎麻进行向打捆空间45的搂拨;拨捆组件44与打结器本体421同侧设置并位于出口452侧边,其在出口452侧边做周期性往复工作将完成打捆的苎麻拨出出口452;传动箱40内的传动机构对外连接驱动机构,并由传动机构连接至搂麻组件41、打结组件42、开合挡板43和拨捆组件44进行带动。
如图4、5所示,打结组件42具体的打结器本体421和捆针422分别在两侧形成打捆空间45,苎麻被持续的从入口451送至打捆空间45,搂麻组件41协助完成将苎麻拨进打捆空间45并压向开合挡板43,随着苎麻在打捆空间45中直径不断增大,开合挡板43所受力不断增大,其扭矩不断增大;扭矩传感器431将信号送至割捆机上设置的单片机中,直径达到期望值时,即当扭矩达到单片机内预设值时,单片机输出信号,控制打结组件42对应的驱动机构带动传动机构动作,令打结器本体421和捆针422工作完成打结,之后开合挡板43打开且拨捆组件44动作插入苎麻捆,将苎麻捆拨出打捆空间45,抛至田间,开合挡板43闭合完成一次打结,该打结过程在0.9秒内完成。相对于传统小型手扶式苎麻割捆机在苎麻中部单结打捆的方式,采用上下两组打结组件42完成上下两个位置的打捆,对于茎秆细高的苎麻打结效果更好;在苎麻收集的打捆空间45的入口和出口分别设置搂麻组件41和拨捆组件44,苎麻可以更好的输入整理和成捆后输出,令打捆工序顺畅连贯,成捆效果好;整体机构可实现自动化的苎麻输送、打捆、输出流畅完成,提高机器的功能性和成品率。
作为一种改进的具体实施方式,传动箱40的传动机构包括输入轴401、搂麻传动轴402、打结传动轴403以及开合传动轴404,输入轴401、搂麻传动轴402、打结传动轴403上分别设置第一齿轮4011、第二齿轮4012和第三齿轮4013进行依次啮合传动,其中输入轴401和第一齿轮4011、第二齿轮4012和搂麻传动轴402进行固定设置,第三齿轮4013可旋转的套设于打结传动轴403上,打结传动轴403和第三齿轮4013上还设置有离合机构405,离合机构405合拢时令打结传动轴403和第三齿轮4013进行同步旋转,令对外连接动力源的输入轴401同步带动搂麻传动轴402和打结传动轴403进行旋转,搂麻传动轴402和打结传动轴403分别连接搂麻组件41和打结组件42进行带动,开合传动轴404通过设置独立的动力源,开合传动轴404连接开合挡板43进行联动。
如图6所示,具体传动箱40的传动机构在工作时,为提高机构运动的流畅性,并减少传动机构的繁琐设置以及驱动机构的数量设置,采用了机构间可以联动的结构,并通过离合机构405控制机构间的联动或者分离。在苎麻收集期间,离合机构405相分离,即输入轴401通过第一齿轮4011带动第二齿轮4012和第三齿轮4013时,仅搂麻传动轴402进行联动,从而带动搂麻组件41在进行把苎麻拨进打捆空间45的动作,打结组件42未被带动;而在苎麻直径达到期望值时,单片机输出信号令离合机构405合拢,使第三齿轮4013和打结传动轴403联动,从而使打结组件42能够被带动完成打结工作,完成打结后离合机构405分离,可以快速切断打结传动轴403的联动关系;从而可以一组驱动机构通过输入轴401的输入带动搂麻组件41和打结组件42的动作,减少了驱动机构的数量,简化了传动结构的布置,令传动箱40以及其中的传动机构可以设计的更加简单小巧,做到控制成本和不占用机器的整体体积。另外的开合传动轴404可通过连接单独的驱动机构进行自身的控制和动作,不与其他机构产生干扰。
作为一种改进的具体实施方式,离合机构405包括第一推拉式电磁铁4051、推块4052、下卡盘4053和上卡盘4054,上卡盘4054和第三齿轮4013一体设置,下卡盘4053与推块4052连接,推块4052由第一推拉式电磁铁4051驱动进行往复运动,控制上卡盘4054和下卡盘4053合拢联动或相互分离;下卡盘4053包括下部外圆周设置的一圈凹台40531,推块4052具有一嵌入凹台40531的配合块40521,下卡盘4053的旋转不与推块4052发生联动,推块4052的往复运动通过嵌入凹台40531的配合块40521作用于下卡盘4053进行联动。
如图6所示,具体采用第一推拉式电磁铁4051,从而控制推块4052完成往复两个工位的准确调整,可以稳定的进行下卡盘4053和上卡盘4054的合拢或者分离,结构简单稳定,整体占用的空间较小,为一个柱形的空间,不影响空间上其他机构的布置。具体凹台40531的设置,令配合块40521嵌入其中,在下卡盘4053旋转时,凹台40531的空间不与配合块40521产生联动,保证下卡盘4053和上卡盘4054的正常旋转不受干扰,而在推块4052相对下卡盘4053轴向进行往复运动时,推块4052又能作用于凹台40531的上下侧壁实现对下卡盘4053的带动位置调整;结构在设计时没有扩展占用外部空间,可以更好的控制或缩小整体机构的占用空间。
作为一种改进的具体实施方式,上卡盘4054的下部具有波浪形下凸环,下卡盘4053的上部具有波浪形上凸环,两者通过下凸环和上凸环的相互嵌合进行旋转时的联动。
如图6所示,下凸环和上凸环设置为波浪形令两者没有尖锐的角结构,在两者合拢的过程中,就算刚好出现两者突出的位置相对时,也不会产生严重的磕碰损坏或卡死的情况,随着第三齿轮4013的进一步旋转,上凸环会顺利的进入下凸环的空隙,两者充分嵌合后,可以由较缓和的波浪形接触面受力进行配合转动。
作为一种改进的具体实施方式,开合传动轴404的动力源为第二推拉式电磁铁4041,第二推拉式电磁铁4041进行往复运动而带动开合传动轴404的往复旋转。
如图6所示,具体采用第二推拉式电磁铁4041,从而控制开合传动轴404带动开合挡板43完成往复两个工位的准确调整,可以稳定的进行出口452的开启或者阻挡,结构简单稳定,第二推拉式电磁铁4041占用的空间较小,为一个横置的矩形空间,不影响空间上其他机构的布置。
作为一种改进的具体实施方式,搂麻组件41包括上中下三组搂麻臂411,上方搂麻臂411与上方打结组件42对应设置,中部搂麻臂411与下方打结组件42对应设置,下方搂麻臂411位于下方打结组件42的下部;拨捆组件44包括三组拨捆臂441,上方拨捆臂441设置于下方打结组件42的上方,中部和下方拨捆臂441间隔设置于下方打结组件42的下方。
如图4、5所示,为了令苎麻脱离链条式输送机构1后的茎杆稳定,在上中下三个位置分别设置搂麻臂411,其对应上下两组打结组件42分别进行设置,在上中下三个位置更好的稳定苎麻到达打捆空间45,提高苎麻成捆的整齐性,配合两组打结组件42更好的完成打捆动作。同时为了令苎麻更好的被拨动离开打捆空间45抛至田间,在上中下三个位置分别设置拨捆臂441,其对应上下两组打结组件42分别进行设置,在上中下三个位置更好的拨动苎麻完成出料。
作为一种改进的具体实施方式,搂麻组件41还包括两组搂麻竖杆412和搂麻连杆413,两组搂麻竖杆412在竖直方向依次连接三组搂麻臂411令三组搂麻臂411联动,搂麻连杆413一端连接搂麻传动轴402,另一端连接一搂麻臂411,当搂麻传动轴402旋转时带动搂麻连杆413做圆周运动,令搂麻臂11进行周期性往复动作对苎麻进行搂拨。
如图4、5所示,搂麻传动轴402连接了搂麻连杆413后,带动搂麻连杆413做圆周运动,进而带动搂麻臂411进行呈环形轨迹的运动,在这个运动过程中形成了一个从侧边靠外的位置移动至入口451,然后划出弧形的曲线向入口451内运动的状态,实现了一个拨动苎麻的功能。作为一种改进的具体实施方式,打结传动轴403向上连接一连杆组4031,连杆组4031连接捆针422并带动捆针422向着打结器本体421做往复运动进行打捆动作;打结传动轴403向下连接链轮链条机构,链轮链条机构从下部连接至另一侧的打结器本体421,从而驱动打结器本体421的动作。
如图1?6所示,打结器本体421和捆针422的同步动作通过打结传动轴403向下连接链轮链条机构实现从下部进行连接传动,该处链轮链条机构4可采用现有技术布置在机架底部,向下布置从而绕过了上方的苎麻打捆空间45,不影响苎麻的正常输送以及其他机构的布置。
作为一种改进的具体实施方式,拨捆组件44还包括两组拨捆竖杆442和拨捆连杆443,两组拨捆竖杆442在竖直方向依次连接三组拨捆臂441令三组拨捆臂441联动,拨捆连杆443连接至打结器本体421,由打结器本体421动作时带动拨捆臂41进行联动。
如图4、5所示,通过将拨捆连杆443连接至打结器本体421,令两者联动,可以不必额外增设驱动机构额外控制拨捆组件44,拨捆组件44随打结组件42一起动作,然后将苎麻拨出打捆空间45即可;拨捆连杆443可参考搂麻连杆413进行设计,通过被带动进行圆周运动,令拨捆臂441进行呈环形轨迹的运动,进而在出口452处拨出苎麻。
作为一种改进的具体实施方式,开合挡板43设置为上下两组,两组开合挡板43分别对应上下两组打结组件42进行设置。
如图4、5所示,上下两组开合挡板43可以更好的在出口452位置承接苎麻,两组开合挡板43形成一个平面对苎麻产生良好支持,保证之后打结组件42的正常打捆工作,苎麻不易出现倾斜的情况。
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
附图说明
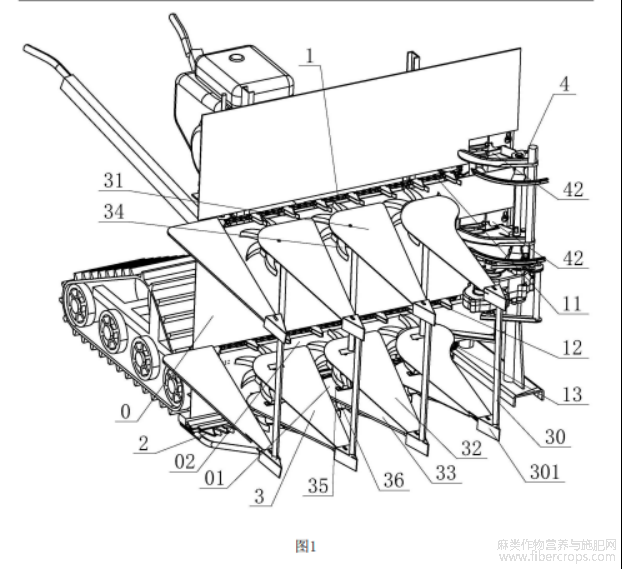
图1为本发明的立体结构示意图一
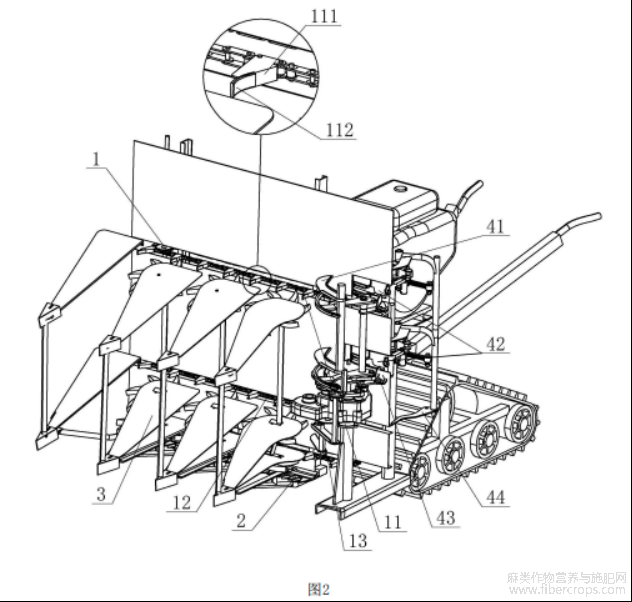
图2为本发明的立体结构示意图二以及局部放大图
图3为本发明的下输送链和切割机构处的立体结构示意图
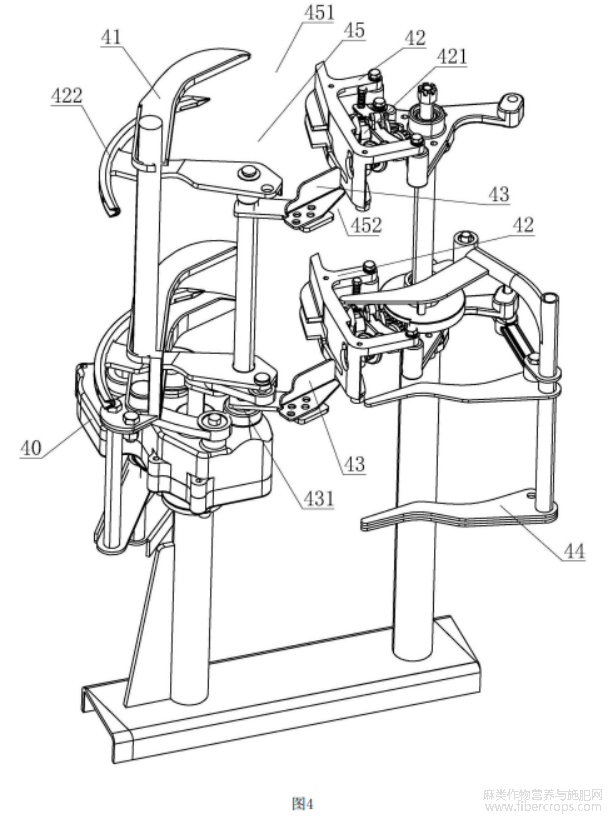
图4为本发明的打捆机构的立体结构示意图一
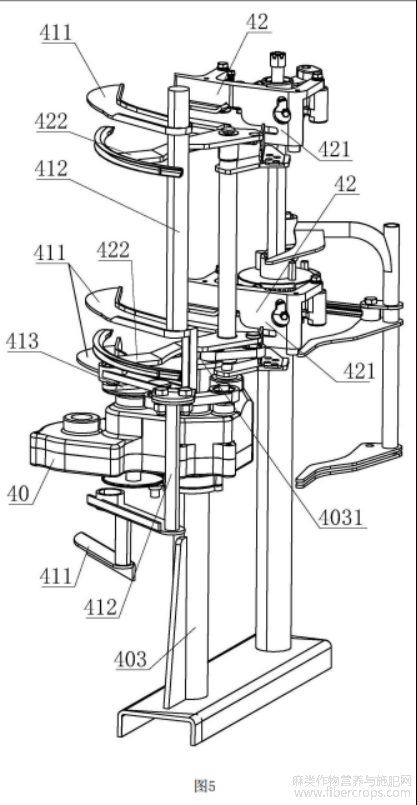
图5为本发明的打捆机构的立体结构示意图二
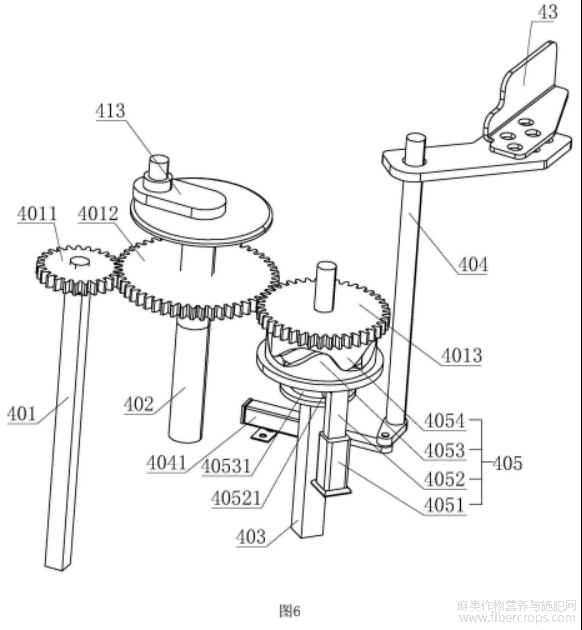
图6为本发明的传动箱去除外壳后的立体结构示意图
摘自国家发明专利,发明人:张彬,司书宁,黄继承,田昆鹏,沈成,刘浩鲁,申请日:2022.04.20,申请号:202210419478.2
