摘 要:为了实现大规模的工业大麻种植,满足市场需求。该文探讨了工业大麻播种机的控制系统设计方案,介绍了工业大麻研究现状,提出了工业大麻播种机控制系统自主设计方案,并对该控制系统进行了试验验证。结果表明,该控制系统具有自动化程度高、作业效果好等特点,同时还可根据不同种植要求进行调整,以满足不同客户需求。该控制系统可实现大规模工业大麻种植,具有良好的经济效益和社会效益,可为工业大麻种植提供有效的技术支持与推广。
关键词:工业大麻;播种机;机构设计;种植特点;自主设计
随着全球对工业大麻的需求量越来越大,大部分国家和地区开始放宽对工业大麻种植和使用的限制,工业大麻产业也逐渐兴起[1-3]。据市场研究机构Grand View Research发布的报告显示,全球工业大麻市场规模从2019年约4.4亿美元增长到2020年的5.4亿美元,预计到2027年增长至29.6亿美元[4-5]。随着市场规模的扩大,大麻种植量也随之增加,如何提高种植效率和降低成本成为工业大麻种植过程中急需解决的问题[6-8]。
目前,传统工业大麻种植方法大多采用人工播种的方式,由于大麻种子体积小、数量多,且种植密度对工业大麻的产量和质量都有很大影响,存在效率低下、精度不高、劳动强度大等问题[9-11]。目前,市场上现存的工业大麻播种机,由于其设计不合理、机械结构简单、播种效率低等问题,无法满足实际种植需求[12-15]。因此,设计一款高效、精准、自动化程度高的工业大麻播种机变得尤为重要。
针对以上问题,本研究基于工业大麻的种植特点和传统的种植方法,包括播种时间、播种深度、行距等,分析市场上已有的工业大麻播种机的优缺点,并提出自主设计的播种机控制系统构想和方案,该控制系统可根据不同的种植要求进行调整,以满足不同客户需求。最后,对该机器的设计和方案进行试验验证。研究结果旨在为工业大麻的种植提供有效技术支持和推广,为工业大麻产业的发展提供了有力保障。
1工业大麻播种机研究进展分析
近年来,工业大麻作为一种具有广泛用途的植物,受到了越来越多的关注。为了提高工业大麻的种植效率、降低成本,目前已有不少学者和企业针对工业大麻播种机进行研究和开发[16]。在国外,工业大麻在北美、欧洲等地受到广泛关注,因此,这些地区研究和开发工业大麻播种机器的机构也比较多,虽然国内工业大麻产业起步较晚,但近年来发展也较为迅速[17-19]。
2工业大麻播种机控制系统的设计
工业大麻播种机控制系统是机器的核心部分,它负责整个机器的运行和调整,通过传感器获取土地和植物信息,并根据预设的参数进行控制和调整[20]。
2.1传感器的选择与布置
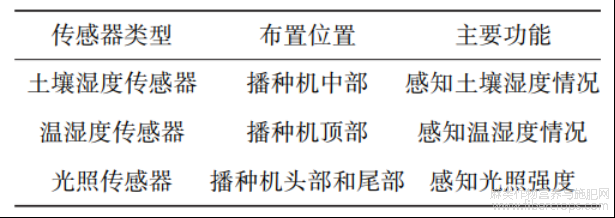
在设计控制系统时,应选择适合工业大麻种植环境的传感器,如土壤湿度传感器、温湿度传感器、光照传感器等,这些传感器可感知土壤和植物信息,为后续的控制和调整做准备,各传感器选型及技术参数如表1所示。土壤湿度传感器DFRobotSEN0193通过模拟输出和数字输出两种方式读取土壤湿度信息,适用于多种土壤类型条件下的土壤湿度检测;温湿度传感器DHT11采用单总线通信方式输出数字信号,具有低功耗和高精度的特点;光照传感器TSL2561通过I2C接口输出数字信号,具有高灵敏度和低功耗等特点,适用于多种光照强度的检测场景。同时,该传感器还支持可编程增益放大器和定时器,以满足不同应用需求[14-17]。传感器的布置也很关键,应在合适的位置上安装传感器,以保证传感器可以准确地感知土地和植物信息,并传输给控制系统。本研究传感器布置方式如表2所示[18]。
表1传感器选型及技术参数

表2传感器布置方式
2.2控制参数设计
在控制系统中,应设置合适的控制参数,包括种植密度、排种间距、播种速度等,这些参数通常根据工业大麻的种植要求和土地情况进行设置,以保证工业大麻的良好生长和产量。在设置控制参数时,要综合考虑工业大麻的种植需求和机器的性能要求,从而达到最优种植效果,保障机器高效稳定运行。
2.2.1种植密度和排种间距
工业大麻的种植密度和排种间距是影响其产量和质量的重要因素。种植密度是指在单位面积内种植工业大麻的植株数量,排种间距是指相邻两株工业大麻植株之间的距离。这两个参数的取值需要根据具体的工业大麻品种和种植要求进行合理设计和调整。一般来说,种植密度越大,产量就越高,但是过高的密度也会影响植株的生长和健康。排种间距也需要根据土地情况和植株生长情况进行设置,以保证植株之间有足够的空间和养分。
本研究工业大麻的种植密度为3~6株/m,排种间距设置为20~30cm,到了成熟期可适当增加至30~50cm,充分利用土地资源,保证工业大麻的正常生长和发育。
2.2.2播种速度
播种速度和排除杂草速度也是影响工业大麻生长和产量的重要素。播种速度需要根据种植密度、排种间距和播种深度等因素进行调整[19-21]。一般来说,播种速度应适中,以保证种子的均匀分布和生长环境的稳定性。本研究工业大麻的播种速度为30~50颗/min。
2.2.3机器的运行速度
机器运行速度需要根据土地面积、种植密度和排种间距等因素进行调整,功耗则需要控制在合理范围内,以保证机器的能源消耗和使用成本。保证机器在作业过程中能够稳定运行,可减少故障和维护成本。在本研究中,机器的运行速度根据土地情况和种植密度等因素调整为2~3km/h。
2.3控制算法设计
控制算法是工业大麻播种机控制系统的核心,直接影响着机器的性能和效果。在设计控制算法时,应综合考虑机器的硬件特性和种植环境变化,选择合适的算法实现自动化控制。常用的控制算法包括PID算法、模糊PID控制算法、神经网络控制算法等。其中,PID算法是最常用的控制算法之一,可根据误差、偏差和积分时间来计算输出的控制信号,具有简单、稳定的特点。模糊PID控制算法和神经网络控制算法也逐渐应用于工业大麻播种机控制系统中,这些算法可根据多个变量和模糊逻辑推理来计算输出信号,精确地控制机器的运行。在工业大麻播种机控制系统中,可以通过收集土壤湿度、温度、光照等传感器的数据,建立相应的模糊规则库,设计模糊控制算法,以实现对播种速度等控制量的计算和输出。
本研究使用三角形隶属函数对输入量和输出量进行模糊化处理,通过模糊推理得到控制量,最终实现工业大麻播种机的自动控制。模糊PID控制器主要包括以下5部分[22]。1)将传感器采集数据进行模糊化处理,转化为隶属度函数;2)根据经验设计控制规则库;3)根据规则库将模糊化后的数据转化为控制量;4)将控制量进行解模糊化处理,得到具体的控制信号;5)解模糊化后的控制信号输入到PID控制器中,实现对工业大麻播种机的自动控制。
2.4软件控制程序
工业大麻播种机软件控制程序通过传感器采集的数据和控制算法的计算,实现机器的自动化调整和控制。本研究中,软件控制程序主要包括以下功能:
1)数据采集和处理。软件控制程序通过传感器采集土壤湿度、环境温湿度、光照强度等数据,并进行处理和分析,生成相应的控制信号。
2)控制算法的实现。软件控制程序实现了模糊PID控制算法,根据传感器数据和预设参数计算出相应的控制信号。
3)用户界面的设计。软件控制程序设计了对用户友好的界面,实时显示土壤湿度、温湿度、光强度等数据,并提供相应的控制参数设置界面,方便用户进行操作和调整。
4)数据存储和分析。将采集到的数据存储到数据库中,并提供数据分析和统计功能,为后续数据挖掘提供支持。
5)故障检测和处理。实时监测机器运行状态和传感器工作情况,一旦出现故障,程序会自动报警并提供相应的故障处理方案。故障检测和处理。实时监测机器运行状态和传感器工作情况,一旦出现故障,程序会自动报警并提供相应的故障处理方案。
3田间试验
3.1试验设计与方法
选择适合工业大麻机播的种子和肥料,并按照一定比例进行混合,以满足工业大麻的生长需求。本研究选择纤维大麻作为试验对象,并在试验田内调试好工业大麻播种机。
试验地随机分为试验组和对照组,每组选取相同数量的试验区域。对照组为传统机械播种,记录播种效率和精度;试验组使用预先设定好的工业大麻播种机进行播种,记录播种机上传感器显示的参数数据和控制参数数据。两组的播种密度、排种间距和播种速度保持一致。试验地随机分为试验组和对照组,每组选取相同数量的试验区域。对照组为传统机械播种,记录播种效率和精度;试验组使用预先设定好的工业大麻播种机进行播种,记录播种机上传感器显示的参数数据和控制参数数据。两组的播种密度、排种间距和播种速度保持一致。
3.2测定指标
测定指标主要包括播种效率、播种精度和机器性能。播种效率计算公式如式(1),播种精度计算公式如式(2)

式中 E—播种效率,%;
A—播种面积,m2/h;
T—播种时间,h。

式中 P—播种精度,%;
S—实际播种数量,个;
S0—设定播种数量,个。
3.3结果与分析
根据以上设计方案进行试验后,得到如下结果:
1)对照组的平均播种效率为20颗/min,平均播种精度在深度偏差±2mm以内,种子分布均匀性较好。
2)试验组的平均播种效率为60颗/min,平均播种精度在深度偏差±2mm以内,种子分布均匀性较好。
3)机器性能方面,试验组的机器稳定性和功耗表现良好,速度相对于对照组有所提升。
田间试验结果表明,使用工业大麻播种机进行播种,提高了播种效率和播种精度,操作性能也有明显提升,机器的稳定性和功耗表现良好。
4结论
本文设计了一款带有传感器技术和控制算法的工业大麻播种机,该机器能够实现自动化播种,保证了播种的准确性,提高了作业效率,满足工业大麻种植的要求。试验结果表明,模糊PID控制算法能够对土壤湿度传感器、温湿度传感器和光照传感器所采集的数据进行智能分析,并依据分析结果指导工业大麻播种机进行自动化作业,从而有效提高工业大麻播种机的播种效率和播种精度,实现播种性能的提高。
综上,本文提出的工业大麻播种机控制系统方案,能够满足工业大麻种植的需求,具有一定的实用价值。
参考文献
[1]吕江南,马兰,刘佳杰,等.黑龙江省工业大麻产业发展及收获加工机械情况调研[J].中国麻业科学,2017,39(2):94-102.
[2]向伟,马兰,刘佳杰,等.工业大麻生产全程机械化技术研发现状与展望[J].中国麻业科学,2021,43(6):320-332.
[3]孔祥彬,张连晓,初文红,等.工业大麻耐盐碱性研究进展[J].现代化农业,2022(12):38-42.
[4]向伟,马兰,刘佳杰,等.工业大麻初加工技术及装备研究进展[J].中国农机化学报,2022,43(6):96-103.
[5]王东凯,宫海楠.工业大麻的发展脉络及在医疗领域的应用动态[J].黑龙江科学,2022,13(22):124-126+131.
[6]曹焜,孙宇峰,张晓艳,等.盐碱胁迫对工业大麻生长发育的影响[J].种子,2022,41(11):37-46.
[7]吴广文.黑龙江省大麻发展问题和建议[J].中国麻业科学,2007,29(6):356-357+370.
[8]SALENTIJN E M J,ZHANG Q Y,AMADUCCI S,et al.New developments in fiber hemp(Cannabis sativa L.)breeding[J].Industrial Crops and Products,2015,68:32-41.
[9]姜颖.烯效唑缓解工业大麻苗期干旱损伤效应与机制[D].大庆:黑龙江八一农垦大学,2021.
[10]苏工兵,刘俭英,王树才,等.苎麻茎秆木质部力学性能试验[J].农业机械学报,2007,38(5):62-65.
[11]马兰,刘佳杰,向伟,等.工业大麻干茎加工处理试验研究[J].中国麻业科学,2020,42(6):263-272.
[12]赵晓顺,赵达卫,闫青,等.基于模糊PID的电控精量播种系统与试验研究[J].河北农业大学学报,2021,44(1):120-127.
[13]李英.基于模糊神经网络的液压式播种机电气控制系统研究[J].农机化研究,2020,42(7):237-240.
[14]刘岩.播种机自动控制系统的设计:基于模糊自动控制和反馈调节[J].农机化研究,2019,41(6):241-244+257.
[15]郑仕勇,朱强,覃德泽,等.基于多信道路由控制的精量播种机优化设计[J].农机化研究,2016,38(5):138-142.
[16]王风燕,马茵,刘志刚.耕种机虚拟样机精密单体播深和排种仿真研究[J].农机化研究,2016,38(2):17-21.
[17]王林生,马瑛,汪小志,等.基于模糊控制的播种机精密单体播深控制仿真研究[J].农机化研究,2016,38(1):86-89.
[18]徐志成.自动播种机电控系统的模糊控制[J].农机化研究,2014,36(4):12-15+20.
[19]魏国江,潘冬梅,赵越,等.浅析大麻生产中存在的问题及解决途径[J].中国麻业科学,2014,36(6):308-312.
[20]王淞,赵斌,衣淑娟,等.基于IGWO-LADRC的电动绿豆播种机控制系统研究[J].农业机械学报,2022,53(S1):87-98.
文章摘自:公续淇.工业大麻播种机控制系统设计及试验[J]. 农机使用与维修,2024(04):32-35.
