摘 要:本发明涉及一种麻纤维单人操作平台结构的工作方法,它属于麻纤维操作领域。本发明工作时,麻包上退绕下来的长麻纤维平铺到输送带上,通过输送带到达接近感应器位置处停止,同时伸缩气缸带动上压板、下压板向下压紧麻纤维,上压板、下压板之间有支撑弹簧进行缓冲,通过输送带之间的空隙,在不造成其余麻纤维凌乱的情况下,操作工可以对压在板簧位置下面的麻纤维进行快速抓取。本发明结构设计简单合理,安全可靠,工作效率高,操作方便,满足使用需求。
技术要点
1.一种麻纤维单人操作平台结构的工方法,所述麻纤维单人操作平台结构包括底座(1)、支架(2)、上压板(3)、下压板(6)、伸缩气缸(9)、安装杆(10)、板簧(11)、支撑弹簧(12)、多个接近感应器(7)以及用于控制皮带辊(5)的运行从而带动输送带(4)的伺服电机,左右两侧的安装杆(10)固定在底座(1)上,支架(2)固定在两侧的安装杆(10)上,伸缩气缸(9)与支架(2)连接,该伸缩气缸(9)的伸出端与上压板(3)相连,上压板(3)与下压板(6)连接,板簧(11)设置在输送带(4)上,多个接近感应器(7)分别设置在输送带(4)的两侧,其特征在于:具体步骤如下:麻包上退绕下来的长麻纤维平铺到输送带(4)上,通过输送带(4)到达接近感应器(7)位置处停止,同时伸缩气缸(9)带动上压板(3)、下压板(6)向下压紧麻纤维,上压板(3)、下压板(6)之间有支撑弹簧(12)进行缓冲,通过输送带(4)之间的空隙,在不造成其余麻纤维凌乱的情况下,操作工可以对压在板簧(11)位置下面的麻纤维进行快速抓取。
2.根据权利要求1所述的麻纤维单人操作平台结构的工方法,其特征在于:还包括显示屏(13),所述显示屏(13)设置在支架(2)上。
3.根据权利要求1所述的麻纤维单人操作平台结构的工方法,其特征在于:所述伸缩气缸(9)采用三轴伸缩气缸。
技术领域
本发明涉及一种工作方法,尤其是涉及一种麻纤维单人操作平台结构的工作方法,它属于麻纤维操作领域。
背景技术
现有的麻包上退绕下来的长麻纤维,进行快速抓取,费时费力,工作效率低,且麻纤维在传输过程中,易造成凌乱,不能满足现有的工作需求。
因此,提供一种结构设计简单合理,工作效率高,操作方便的麻纤维单人操作平台结构的工作方法,显得尤为必要。
发明内容
本发明的目的在于克服现有技术中存在的上述不足,而提供一种结构设计简单合理,安全可靠,工作效率高,操作方便的麻纤维单人操作平台结构的工作方法。
本发明解决上述问题所采用的技术方案是:该麻纤维单人操作平台结构的工方法,所述麻纤维单人操作平台结构包括底座、支架、上压板、下压板、伸缩气缸、安装杆、板簧、支撑弹簧、多个接近感应器以及用于控制皮带辊的运行从而带动输送带的伺服电机,左右两侧的安装杆固定在底座上,支架固定在两侧的安装杆上,伸缩气缸与支架连接,该伸缩气缸的伸出端与上压板相连,上压板与下压板连接,板簧设置在输送带上,多个接近感应器分别设置在输送带的两侧,其特征在于:具体步骤如下:麻包上退绕下来的长麻纤维平铺到输送带上,通过输送带到达接近感应器位置处停止,同时伸缩气缸带动上压板、下压板向下压紧麻纤维,上压板、下压板之间有支撑弹簧进行缓冲,通过输送带之间的空隙,在不造成其余麻纤维凌乱的情况下,操作工可以对压在板簧位置下面的麻纤维进行快速抓取。
作为优选,本发明还包括显示屏,所述显示屏设置在支架上。
作为优选,本发明所述伸缩气缸采用三轴伸缩气缸。
本发明与现有技术相比,具有以下优点和效果:整体结构设计简单合理,安全可靠,工作效率高,操作方便,通过输送带之间的空隙,在不造成其余麻纤维凌乱的情况下,操作工可以对压在板簧位置下面的麻纤维进行快速抓取;接近感应器是根据探测到的麻纤维位置,控制设备上的输送带停止工作;光栅感应器是操作工抓取麻纤维时,光栅感应器探测到手和手臂,控制设备上的输送带运行工作。
附图说明
图1是本发明实施例的整体结构示意图。
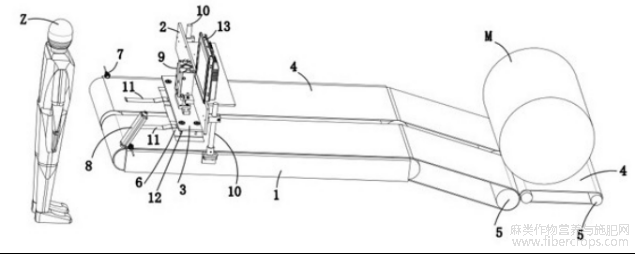
图2是本发明实施例的另一方向的整体结构示意图。
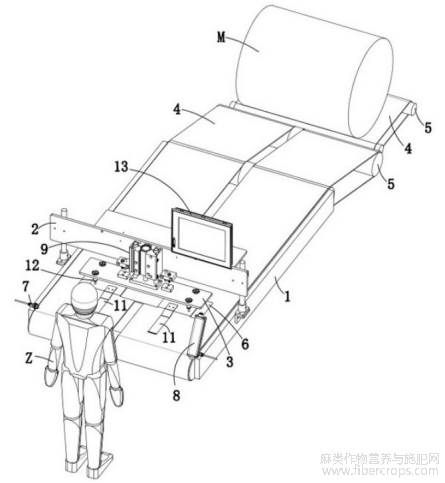
图中:底座1,支架2,上压板3,输送带4,皮带辊5,下压板6,接近感应器7,光栅感应器8,伸缩气缸9,安装杆10,板簧11,支撑弹簧12,显示屏13,操作工Z,麻包M。
具体实施方式
下面结合附图并通过实施例对本发明作进一步的详细说明,以下实施例是对本发明的解释而本发明并不局限于以下实施例。
实施例
参见图1至图2,本实施例麻纤维单人操作平台结构包括底座1、支架2、安装杆10、伸缩气缸9、上压板3、下压板6、板簧11以及用于控制皮带辊5的运行从而带动输送带4的伺服电机,安装杆10固定在底座1上,支架2固定在两侧的安装杆10上,伸缩气缸9与支架2连接,该伸缩气缸9的伸出端与上压板3相连,上压板3与下压板6连接,板簧11设置在输送带4上。
本实施例中的上压板3与下压板6之间通过支撑弹簧12进行缓冲。
本实施例中的多个接近感应器7分别设置在输送带4的两侧;光栅感应器8设置在底座1上。
本实施例中的伸缩气缸9采用三轴伸缩气缸。
本实施例中的接近感应器7根据探测到的麻纤维位置,控制设备上的输送带停止工作。
本实施例中的光栅感应器8在操作工Z抓取麻纤维时,光栅感应器8探测到手和手臂,控制设备上的输送带4运行工作。
本实施例中的显示屏13是人工根据麻纤维的实际情况,可以在屏幕上设置输送带4的传送距离,同时显示屏13可以显示其他的生产数据信息。
本实施例中的伺服电机主要用来控制皮带辊5的运行从而带动输送带4。
本实施例中的输送带4分为大小输送带,皮带辊5分为大小皮带辊,大小输送带与大小皮带辊匹配;大小输送带之间同步运行,通过伺服电机进行控制,且小输送带会根据麻包M的大小进行速度调节。
本实施例麻纤维单人操作平台结构的工作原理及工作过程如下:麻包M上退绕下来的长麻纤维平铺到输送带4上,通过输送带4到达接近感应器7位置处停止,同时伸缩气缸9带动上压板3、下压板6向下压紧麻纤维,上压板3、下压板6之间有支撑弹簧12进行缓冲,通过输送带4之间的空隙,在不造成其余麻纤维凌乱的情况下,操作工Z可以对压在板簧11位置下面的麻纤维进行快速抓取。
通过上述阐述,本领域的技术人员已能实施。
此外,需要说明的是,本说明书中所描述的具体实施例,其零件、部件的形状、所取名称等可以不同,本说明书中所描述的以上内容仅仅是对本发明结构所作的举例说明。凡依据本发明专利构思所述的构造、特征及原理所做的等效变化或者简单变化,均包括于本发明专利的保护范围内。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
文章摘自国家发明专利,一种麻纤维单人操作平台结构的工作方法,发明人:任维明,林佳家,姜伟,申请号:202311821528.0,申请:2023.12.27
